CS285 Lecture15&16 Offline Reinforcement Learning
CS285 Lecture15&16 Offline Reinforcement Learning
Overview#
这一章讲的是offline RL,主要想法就是之前RL算法都要让policy部署到新的环境来尝试从而进行不断的训练。但是有的场景可能并不能承受住模型的尝试,比如说医疗场景。那offline Rl解决的问题就是给定一个未知policy收集到的数据集,然后只在这个数据集上面来训练我的模型。
那么我们想要的这个策略应该符合一些直觉,我们想要的模型不应该是跟模仿学习一样的,我们不只是先要模仿给定的数据集中的行动。我们想要从中学习到好的动作,从给定的数据集中整理出什么是好的动作,什么是不好的,从而得到比数据集中的数据更好的策略。
Problem#
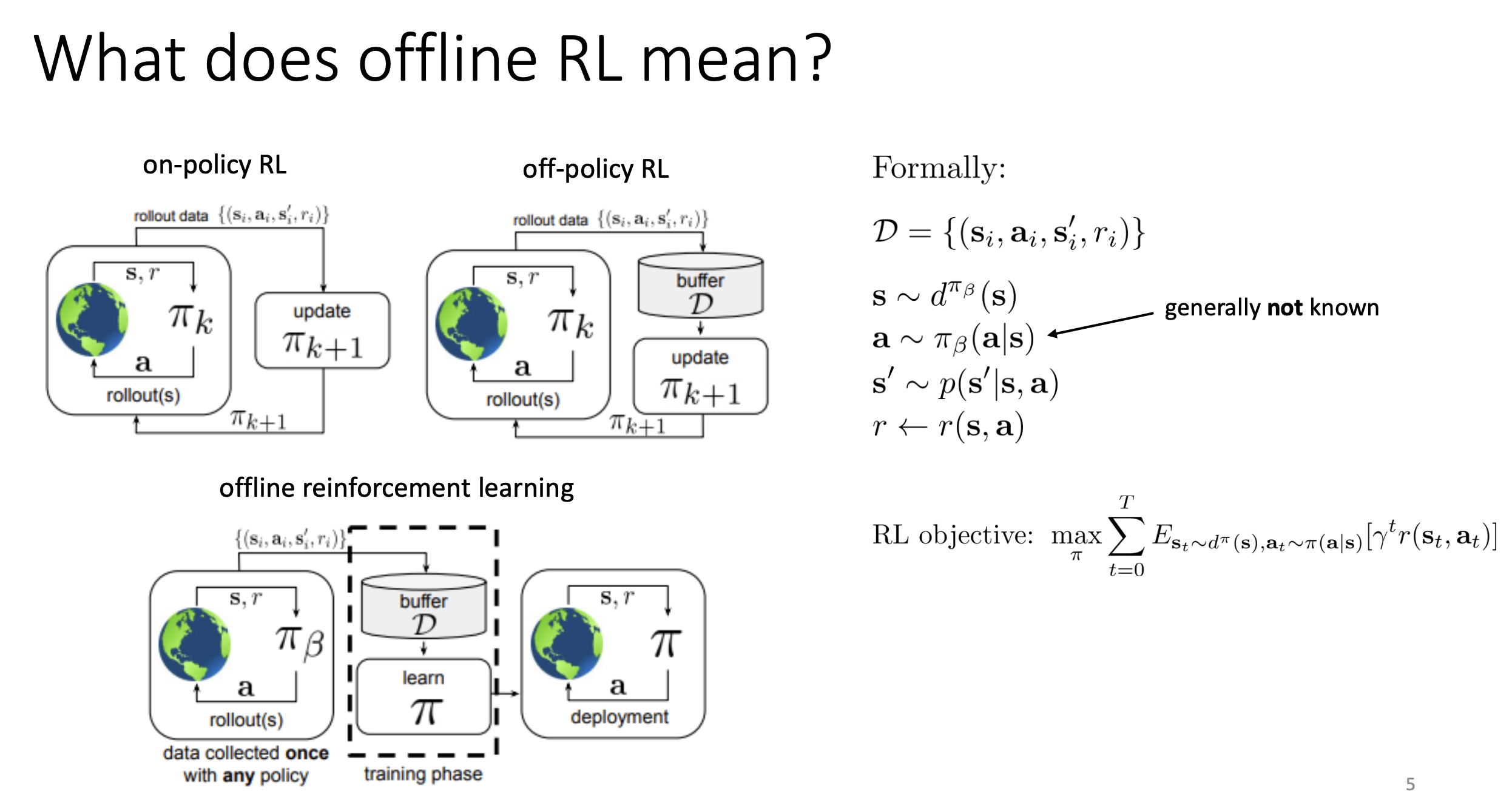
但是直接在离线的数据集上用Q-learning会有一些问题
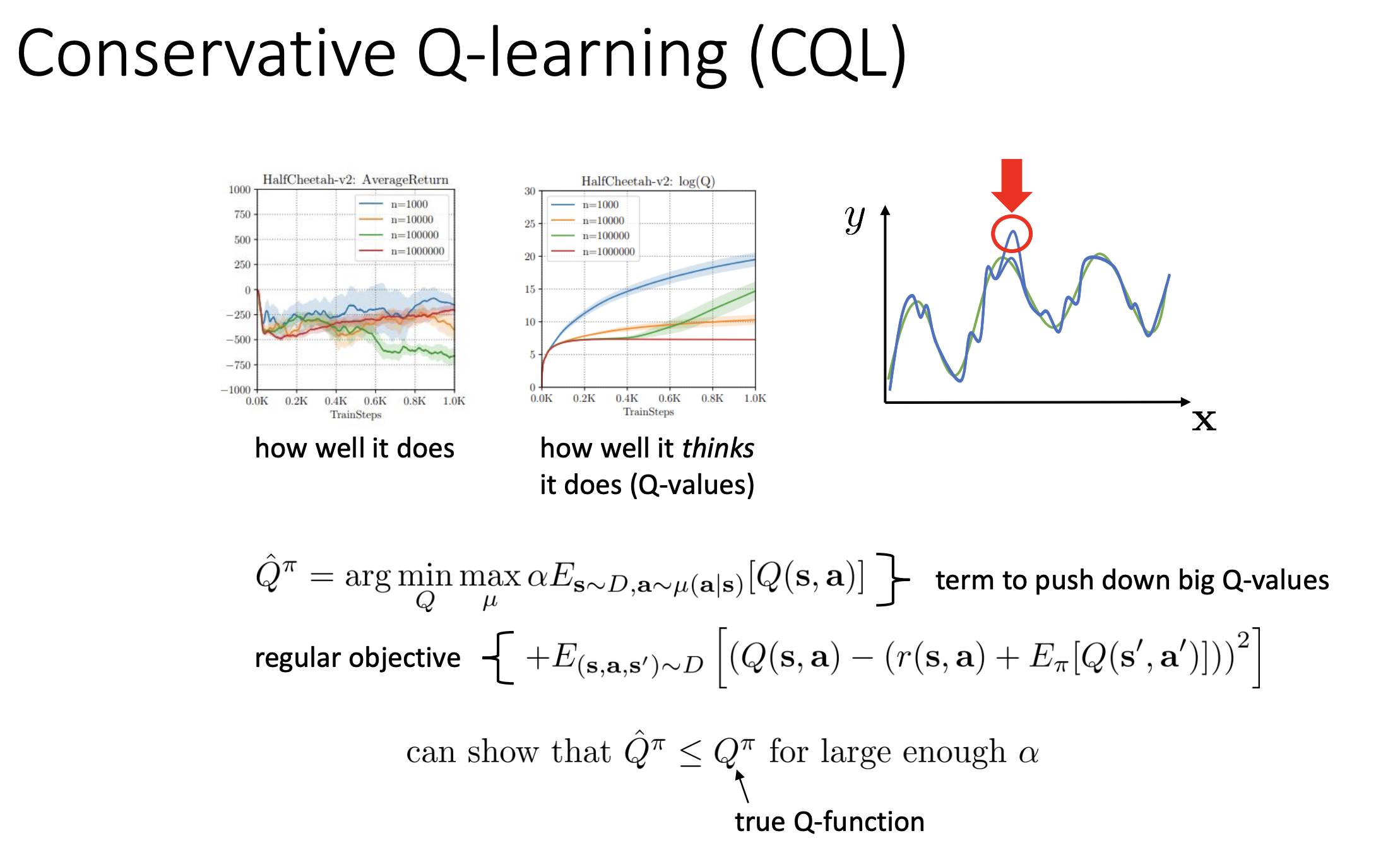
- 左图 (AverageReturn): 随着训练步数(TrainSteps)增加,智能体在实际环境中的表现(平均回报)不仅没有变好,反而急剧下降,甚至跌至负值。这代表“它实际做得有多差” (how well it does) 。
- 右图 (log(Q)): 与此同时,Q 值(对数坐标)却在呈指数级上升(爆炸)。这意味着智能体认为自己会获得天文数字般的回报。这代表“它以为自己做得有多好” (how well it thinks it does)
为什么呢?
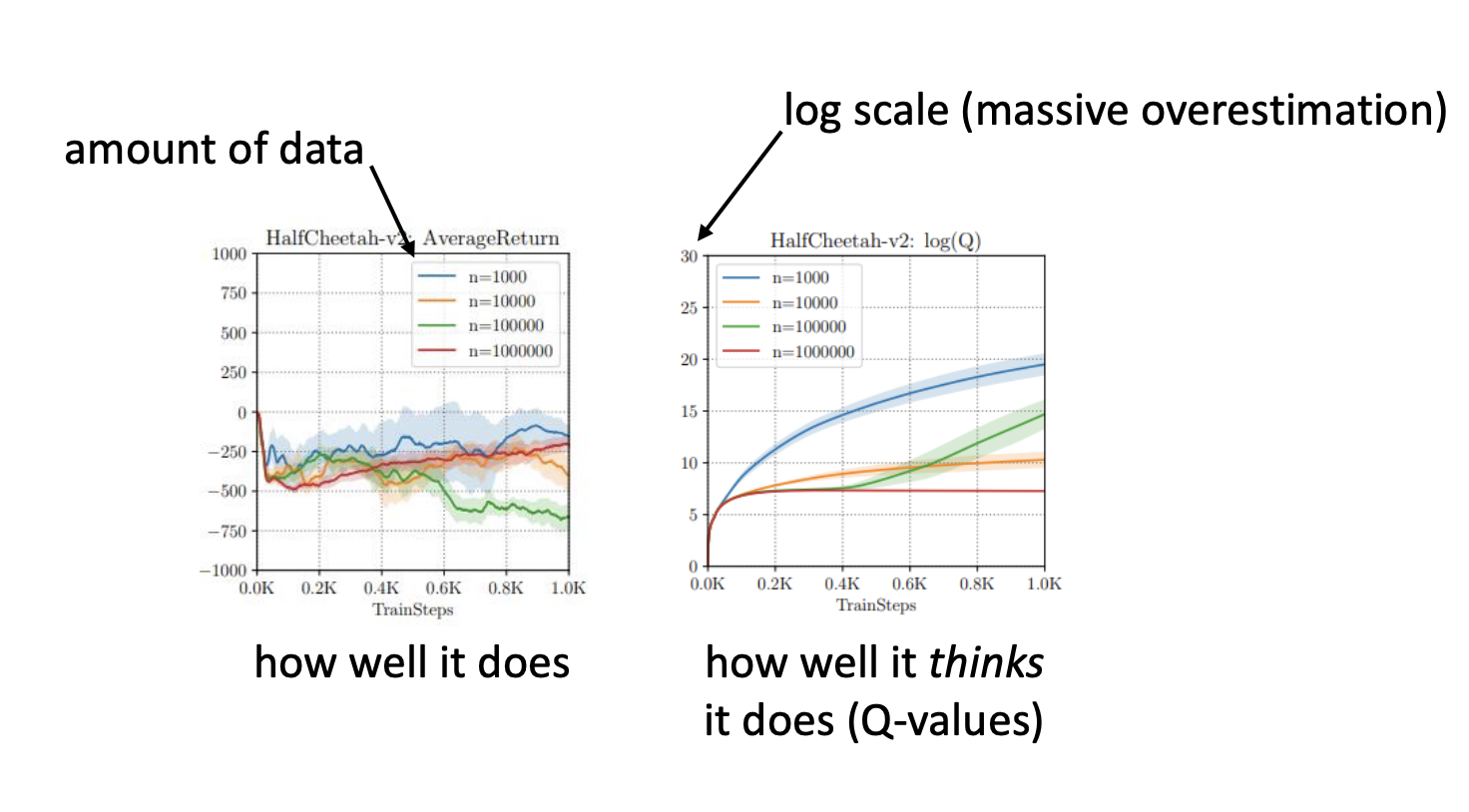
 因为标准 Q-learning 的更新公式:
在 Q-learning 中,我们使用以下目标来更新 Q 值:
因为标准 Q-learning 的更新公式:
在 Q-learning 中,我们使用以下目标来更新 Q 值:
其中,新策略 通常是贪婪策略,即去选择那个让 Q 值最大的动作:
- 分布偏移 (Distribution Shift): 在离线设置中,我们只能看到行为策略 (产生数据的策略)所覆盖的动作。对于未见过的动作(OOD actions),Q 网络(神经网络)的预测是未定义的,可能会有很大的误差(噪声)。
- 最大化带来的问题 (The Maximization Bias):
当你执行 操作时,你实际上是在“寻找” Q 值最高的地方。
- 如果 Q 函数在 OOD 区域恰好有正向的误差(预测值偏高),最大化操作就会直接选中这些动作 。 如果你去优化一个拟合好的函数 ,而 超出了训练数据的范围,你往往会利用模型的误差,找到一个虚假的“伪高点” 。
这个问题在之前的off policy中也有,解决办法就是
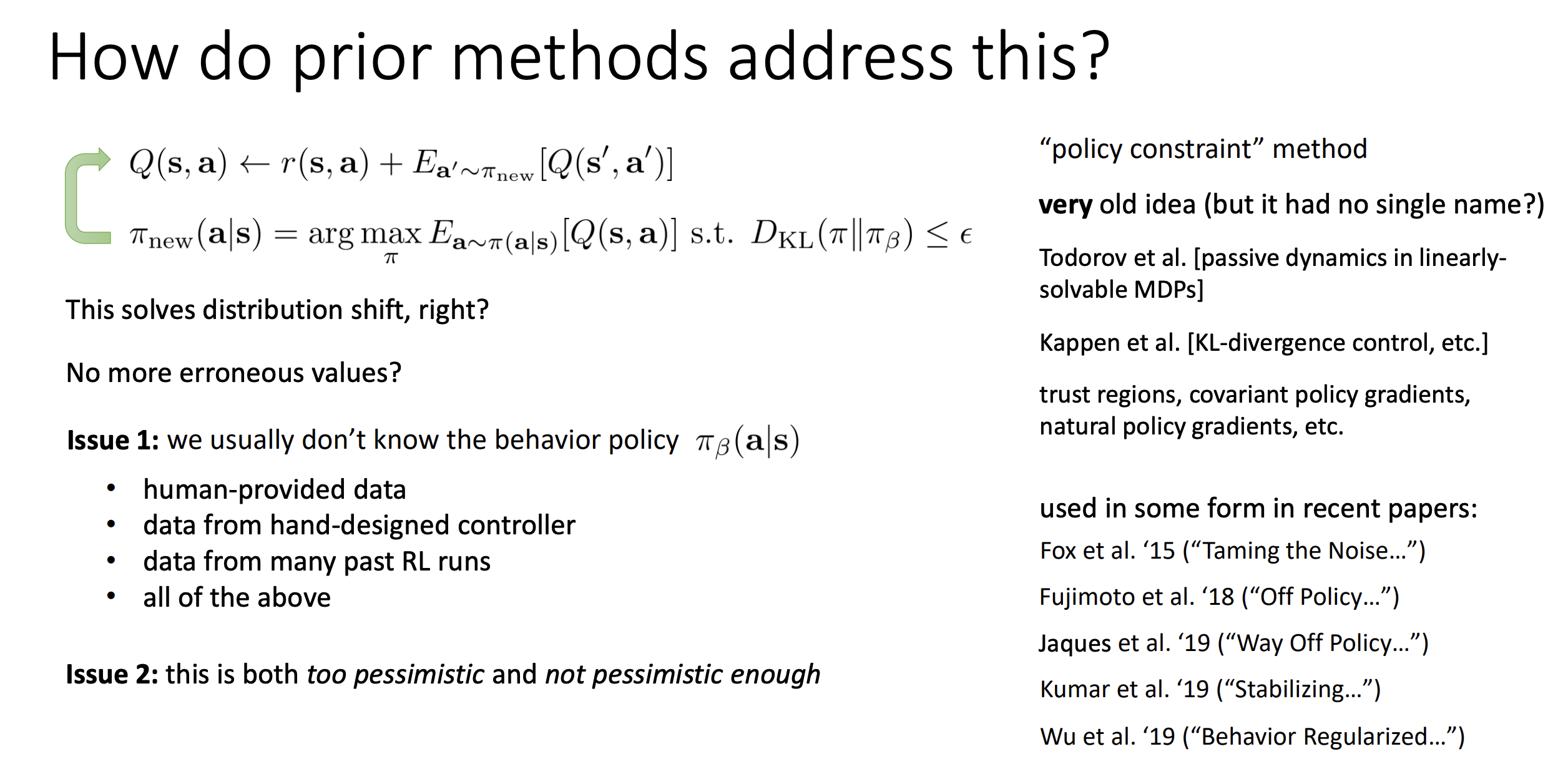 为了防止新学习的策略 偏离数据分布太远(从而进入 Q 值估计不准的区域),我们在更新策略时增加一个约束条件:
为了防止新学习的策略 偏离数据分布太远(从而进入 Q 值估计不准的区域),我们在更新策略时增加一个约束条件:
- 含义: 我们依然希望最大化 Q 值,但是我们要求新策略 和行为策略 (即产生数据的策略)之间的差异(由 KL 散度衡量)不能超过 。
- 目的: 确保新策略只在数据覆盖的范围内进行优化,从而避免查询到那些 Q 值可能极其错误的未见动作(OOD actions)。
虽然这个想法听起来很合理,但是有两个主要问题:
- 问题 1:我们通常不知道行为策略
- 在离线 RL 中,数据集可能来源复杂,例如:
- 人类提供的演示数据 。
- 手工设计的控制器 。
- 过去多次 RL 实验混合的数据 。
- 在这些情况下,没有一个明确的数学公式来表示 ,因此很难直接计算 KL 散度。
- 在离线 RL 中,数据集可能来源复杂,例如:
- 问题 2:这种约束既“太悲观”又“不够悲观”
- 太悲观(Too pessimistic): 即使在某些区域 Q 值估计是准确的,KL 约束也会强行把策略拉回行为策略,限制了改进空间。
- 不够悲观(Not pessimistic enough): 单纯的 KL 散度可能无法精准地剔除那些 Q 值特别离谱的特定动作,或者如果 本身覆盖面很广但数据稀疏,KL 约束可能不足以保证安全。
既然我们要限制新策略 不偏离行为策略 ,我们具体应该用什么样的数学形式来实现这种限制?
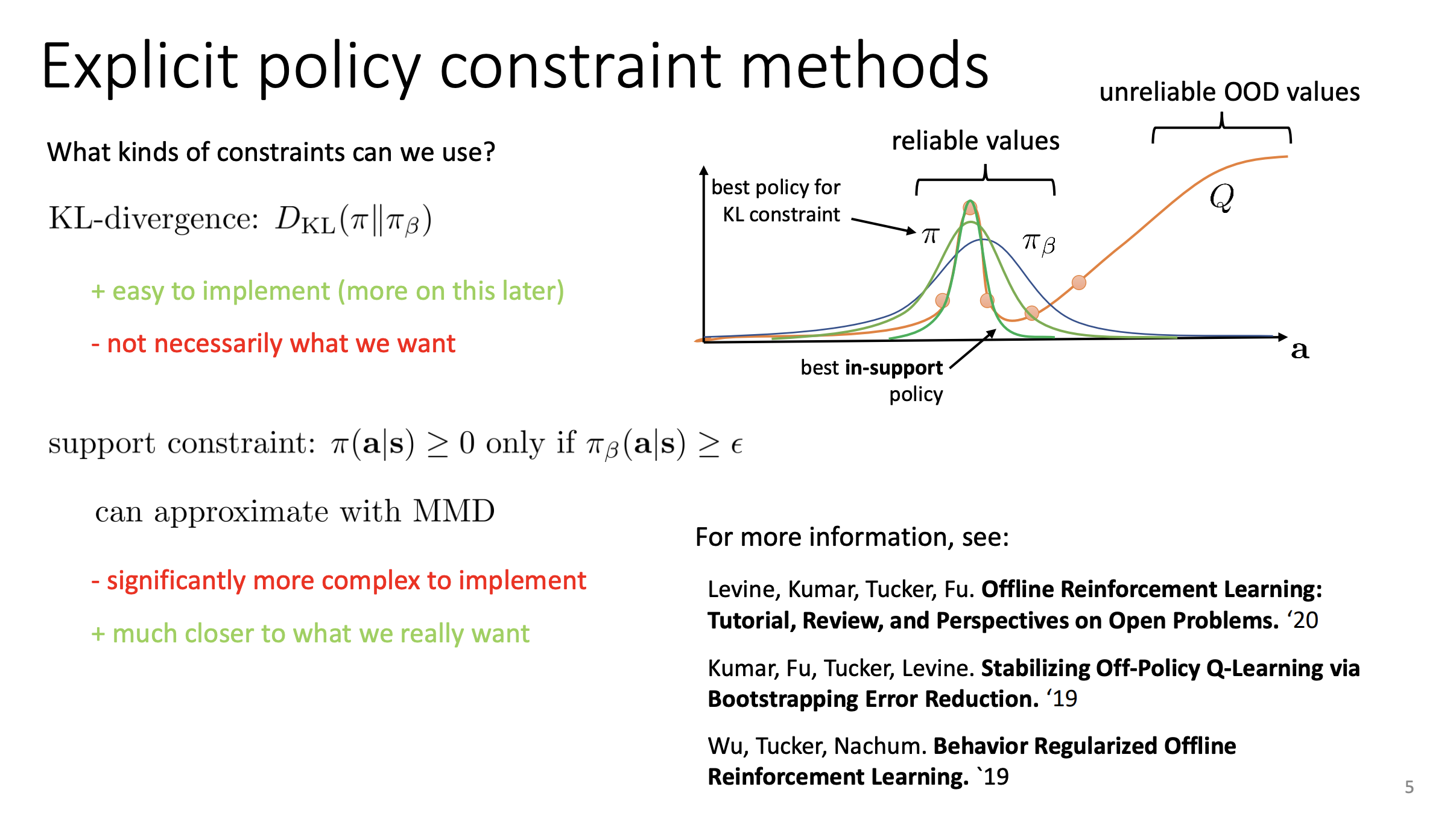
- KL 散度 (KL-divergence)
这种方法要求新策略 和行为策略 的分布形状尽可能相似。
- 优点 (+): 非常容易实现(Easy to implement)
- 缺点 (-): 这不一定是我们真正想要的(Not necessarily what we want)。
- 原因解析:如上图所示,KL 散度会惩罚两个分布之间的差异。为了权衡KL散度,和Q value,KL散度得出来的policy可能就是浅绿色的 ,但是这个策略同样给了一些不好的动作相对较高的可能性。实际上深绿色的那条线可能会更好,但是因为KL散度我们得不出来
- 支持集约束 (Support Constraint)
这种方法只要求:只要 在某个动作上的概率大于一个阈值 (即数据中存在该动作), 就可以选这个动作。
- 含义:他要求 尽量不要跑到坏数据的地方去。
- 优点 (+): 这更接近我们真正想要的(Much closer to what we really want),即在保证安全(有数据支持)的前提下,最大化 Q 值。
- 缺点 (-): 实现起来极其复杂(Significantly more complex to implement)。因为在连续动作空间中,很难硬性定义“支持集”的边界。
隐式策略约束方法(Implicit Policy Constraint Methods)#
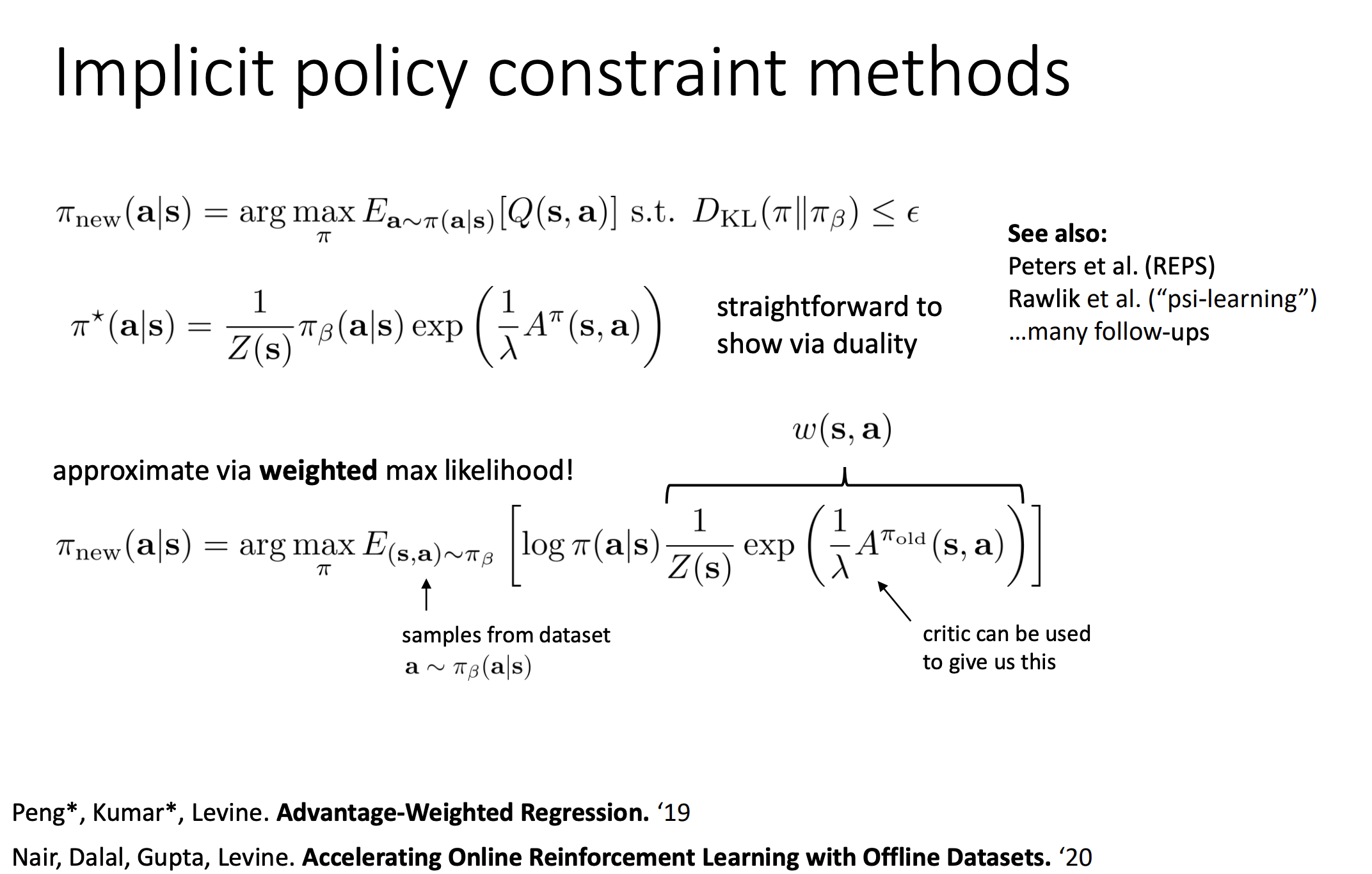 出发点依然是我们之前定义的那个带约束的优化问题 :
出发点依然是我们之前定义的那个带约束的优化问题 :
即:在不偏离行为策略 太远的前提下,最大化 Q 值。
上述问题实际上是一个经典的凸优化问题。通过使用拉格朗日乘子法(Lagrange Multipliers) 和对偶性(Duality),我们可以直接推导出最优策略 的数学形式 2:
- :原本的数据分布(行为策略)。
- :指数项,用于调整概率。
- :优势函数(Advantage Function),表示动作 比平均水平好多少。
- :拉格朗日乘子(温度参数),控制约束的强弱。
- :归一化常数(Partition Function),确保概率之和为 。
直观理解: 最优策略其实就是把原来的数据分布 进行“重新加权”(Re-weighting)。
- 如果某个动作的优势 很大(Q 值很高),它的权重就会通过 函数指数级增加。
- 如果优势很小或为负,权重就降低。
- 依然是在 的支撑集(Support)内,只是把概率密度向高价值动作倾斜了。
但是这公式仍然要求我们知道 ,于是我们可以用采样,从给定的数据集中采样 这可以通过加权最大似然估计(Weighted Maximum Likelihood Estimation) 来实现:
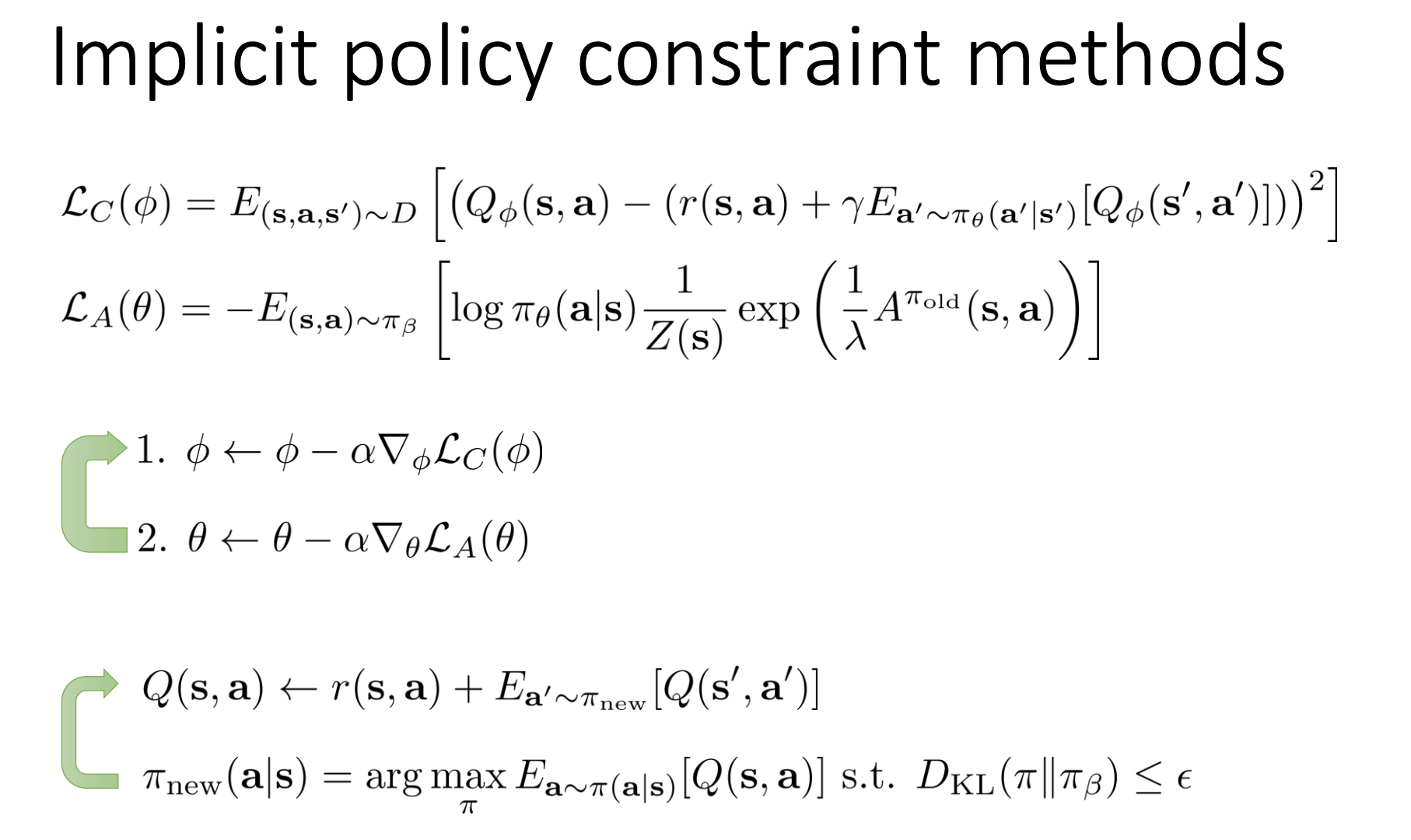 这个方法中,我们用加权回归更新了策略 ,这确实避免了策略训练时的 OOD 问题。但是,第给出的 Critic(Q 函数)的损失函数:
这个方法中,我们用加权回归更新了策略 ,这确实避免了策略训练时的 OOD 问题。但是,第给出的 Critic(Q 函数)的损失函数:
注意公式中的目标值(Target Value)部分:。
- 为了计算这个目标值,我们需要用当前正在学习的策略 去采样下一个动作 。
- 然后把这个 喂给 Q 网络去估值。
依然存在的 OOD 风险
- 如果当前的策略 还没有训练得很好(或者在某些状态下稍微偏离了数据分布),它产生的动作 就可能是分布外(OOD)的 。
- 一旦 是 OOD 的,Q 网络 的输出就可能是错误的(通常是过高估计)。
- 这个错误的 Q 值会被作为目标值(Target),反向传播去更新 Q 网络,导致误差累积。
那么有什么方法让他不要产生OOD的动作吗
IQL#
这个方法的目的就是,逼近“数据集里表现最好的动作”:在不产生幻觉的前提下,尽可能贪婪(Greedy)。
在标准的 Q-Learning (比如 DQN 或 SAC) 中,更新 Q 值时使用 Bellman Optimality Equation:
请注意这个 操作。为了找到最大值,算法通常会做两件事之一:
- 对于离散动作:把所有可能的动作都输入 Q 网络,选最大的。
- 对于连续动作(由 Actor-Critic 完成):让当前的策略网络(Actor)生成一个它认为最好的动作 ,然后输入 Q 网络评估。
- 在离线设置中,我们不能与环境交互。
- 策略网络(Actor)可能会为了追求高分,生成一个从未在数据集里出现过的奇怪动作(OOD 动作)。
- Q 网络(Critic)只见过数据集里的动作。对于这个未见过的 OOD 动作,Q 网络无法正确评估,往往会因为泛化误差给出一个虚高的估值(Overestimation)。
- 结果:算法以为发现了一个好的操作,于是拼命往这个 OOD 动作的方向更新,导致训练崩溃。
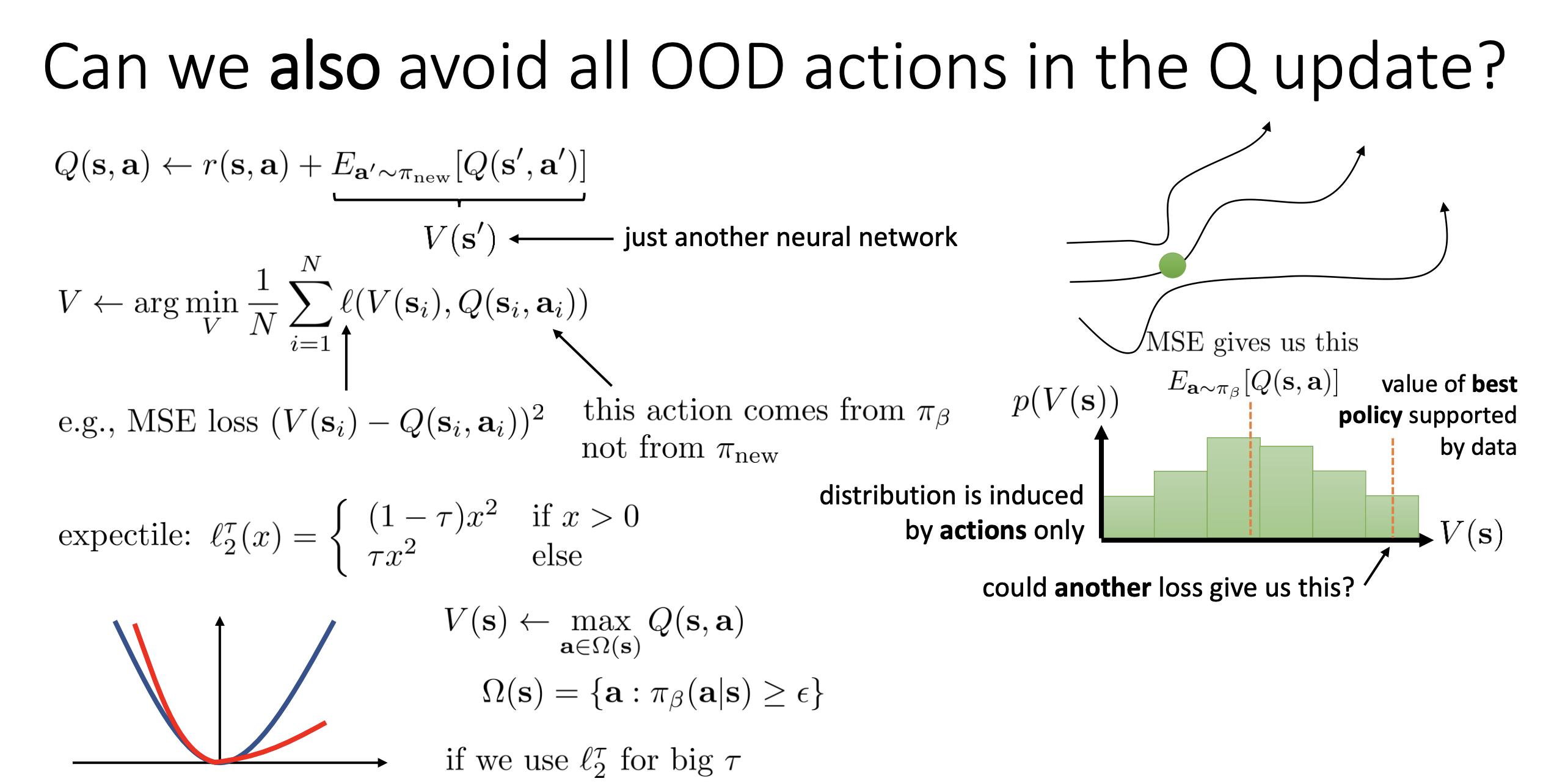
我们不再让 Actor 生成一个 然后去查 ,而是直接训练一个 函数。
- 目标:让 逼近 。
- 手段:Expectile Regression(那个非对称的 Loss)
- 只看数据: 训练 的 Loss 函数里:
这里的 严格来自离线数据集。我们完全没有让 Policy 去生成新动作,也没有去查询任何未知的 。 2. 隐式最大化(Implicit Maximization): 虽然我们只用了数据集里的样本,但通过调节 Expectile 的参数 (比如设为 0.9): - 如果 比 小,Loss 权重很小(忽略差的动作)。 - 如果 比 大,Loss 权重很大(强迫 往大的 Q 值靠拢)。 - 效果: 会自动过滤掉那些平庸的动作,收敛到数据集分布的上边缘(即数据集中表现最好的那个 Q 值)。
CQL#
 这是另一种思路,我们说遇到OOD的时候我们会可能会错误估计这个动作的Q value,于是乎我们的思路就是打压这种错误估计的分数
这是另一种思路,我们说遇到OOD的时候我们会可能会错误估计这个动作的Q value,于是乎我们的思路就是打压这种错误估计的分数
- 这是标准的强化学习(Q-learning)目标。
- 它的意思: “即使我在做离线学习,我也要尽量让预测的 Q 值准确,能够反映真实的奖励。”
“压低”陌生动作的分数(Push Down)
- 是什么意思? 这里的 通常代表模型当前认为“可能很高分”的动作,或者是随机采样的动作。重点是,这些动作不是直接从数据集里拿出来的,而是模型自己“脑补”出来的。
- 为什么要压低(Min)它? 在离线强化学习中,最大的坑就是**“不懂装懂”。模型没见过某个动作,却错误地以为这个动作能得 10000 分(这就是 OOD 高估问题)。 所以这一项说:“凡是你(模型)自己想出来的、数据集中没见过的动作,我都先假设它是坏的,强行把它的 Q 值压低。”**
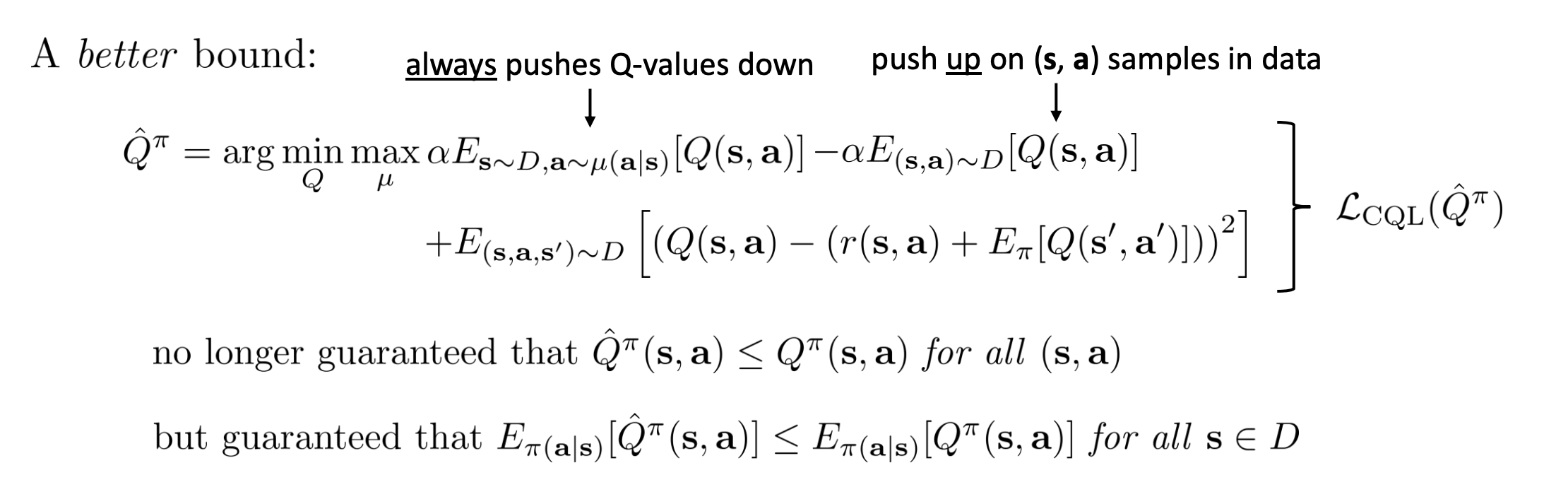
“抬高”已知数据的分数(Push Up)
- 注意前面的负号: 整个大目标是最小化(Min),所以“减去”一项,等于是在最大化这一项。
- 是什么意思? 这些是真真切切存在于数据集里的动作。
- 为什么要抬高它? 这一项说:“但是,如果这个动作是数据集里有的,那就是有事实依据的,我要把它保护起来,把它的分数推高。” 最终结果: 只有数据集覆盖的地方(Data Region),Q 值是凸出来的(高的);而在没有数据的地方(OOD Region),Q 值都被压得低低的。 这样一来,当你用这个 Q 函数去选动作时,它会自动倾向于选择那些高的区域(也就是数据集里的动作),从而避免去选那些未知的、可能有坑的区域。这就是所谓的**“Conservative(保守)”。
Model base offline RL#
MOPO#
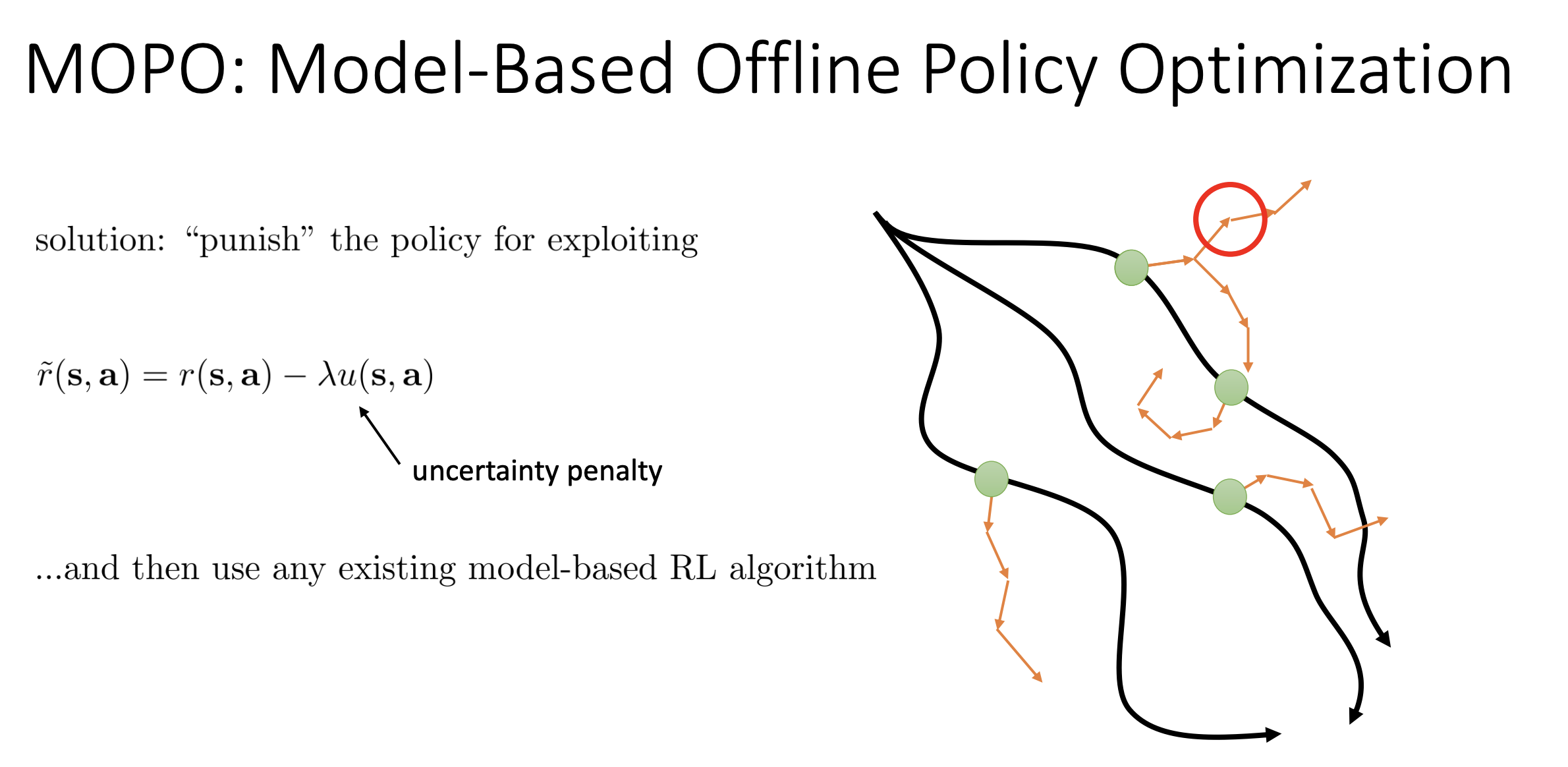 这张 PPT 介绍的是一种名为 MOPO (Model-Based Offline Policy Optimization) 的强化学习算法。它的核心思想是如何在“离线强化学习”(Offline RL)中,利用基于模型(Model-Based)的方法来安全地优化策略。
这张 PPT 介绍的是一种名为 MOPO (Model-Based Offline Policy Optimization) 的强化学习算法。它的核心思想是如何在“离线强化学习”(Offline RL)中,利用基于模型(Model-Based)的方法来安全地优化策略。
- Offline RL(离线强化学习): 智能体不能与环境交互,只能从一个固定的历史数据集(Dataset)中学习。
- 问题(Exploiting): 如果智能体构建了一个环境模型(Model),并在该模型中进行规划,它往往会发现一些模型预测不准确但看起来奖励很高的区域(模型误差)。智能体容易“利用”这些误差,导致在真实环境中表现很差。这被称为 Distribution Shift(分布偏移) 问题。
PPT 左侧提出了核心解决方案:“Punish the policy for exploiting”(惩罚策略的利用行为)。
- 核心公式:
-
:修改后的奖励函数。
-
:原始的奖励函数。
-
:不确定性(Uncertainty)。这代表模型对自己预测的置信度。如果当前状态和动作偏离了训练数据(即模型没见过),不确定性 就会很大。
-
:惩罚系数。
-
直观理解: 算法通过人为降低那些“模型不确定区域”的奖励值,迫使智能体待在模型确信的区域(也就是接近真实数据分布的区域),从而避免由于模型误差导致的策略失效。
-
红色圆圈: 代表模型推演进入了未知区域(High Uncertainty)。在这种地方,MOPO 算法会通过上述公式给予高额惩罚,告诉智能体“这里很危险,不要往这里走”。
COMBO#
MOPO是通过“修改奖励”来避开风险,那么COMBO则是通过压低 Q 值来通过风险。
- 借鉴 CQL: PPT 开头提到“just like CQL…”。它的核心是:对于未见过的数据,直接把它们的 Q 值(预期回报)压得很低,以此来保持“保守”。
- COMBO 的做法: 它将 CQL 的思想应用到了 Model-Based 方法中。它不需要像 MOPO 那样去计算复杂的“不确定性惩罚”,而是简单粗暴地:凡是模型生成的(可能是假的)数据,我就在训练 Q 函数时,刻意去最小化它们的 Q 值。
COMBO 的核心目标函数,可以拆解为两部分看:
- 第一部分(保守项):
- 最小化模型生成数据 () 的 Q 值:因为模型推演的数据可能是错误的(幻觉),为了安全,算法假设这些路径是“坏”的。
- 最大化真实数据 () 的 Q 值:因为真实数据是 Ground Truth,是可以信任的。
- 通过这一减一加,人为地拉开了“真实数据”和“模型伪造数据”之间的价值差距。
- 第二部分(标准项):
- 这就是标准的 Bellman Error(TD Error),用于让 Q 函数学习正常的预测任务。
如果模型生成了一些“离谱”的数据(即看起来和真实数据完全不一样,属于 Out-of-Distribution),通过上面的公式,Q 函数会很容易把这些离谱数据的价值(Q值)打得很低。这样一来,策略(Policy)在做决策时,自然就不会去选择那些动作,从而避免了模型误差带来的风险。