原本的基础策略梯度估计方法是
∇θJ(θ)≈N1i=1∑Nt=1∑T∇θlogπθ(ai,t∣si,t)(t′=1∑Tr(si,t′,ai,t′))
然后我们把它改进一下,引入 Q 函数
为了数学上的严谨性,PPT 引入了 Q 函数的概念:
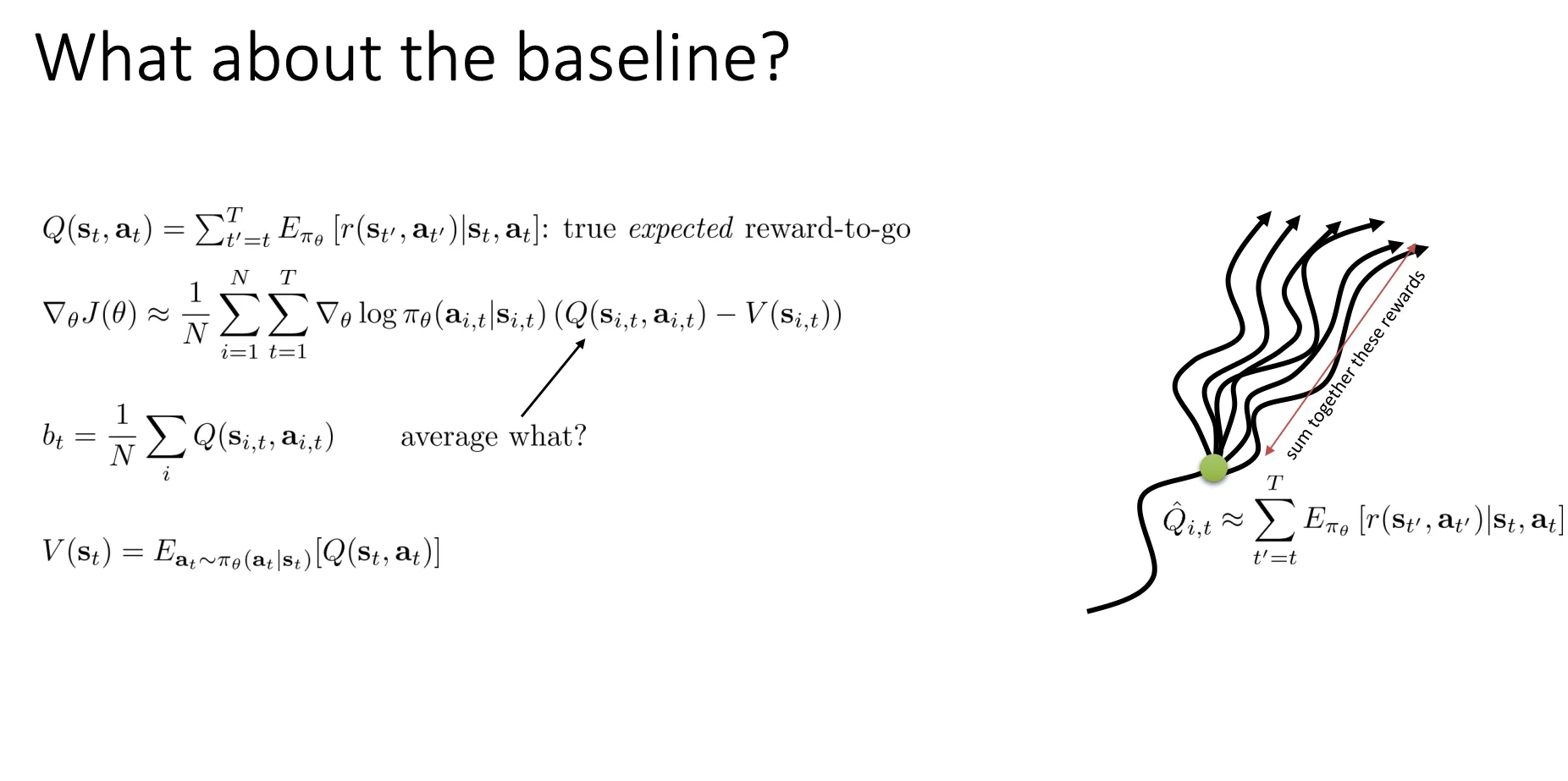
- Q^i,t:这是对在状态 si,t 采取动作 ai,t 后,未来预期能拿到的奖励的估计值。
- Q(st,at):这是真实的期望剩余回报(True expected reward-to-go)。公式为:
Q(st,at)=t′=t∑TEπθ[r(st′,at′)∣st,at]
注意这里的t‘已经是从t开始计算了,根据Causality。然后意思就是
- ∣st,at:这是一个条件概率的写法。意思是“在这个前提下”——前提就是我们现在的脚正站在 st,且现在的手正做动作 at。这一步是确定的,已经发生了。
- Eπθ:意思是“对于这一步之后的所有步骤,我们要按照策略 πθ 产生的概率分布来计算平均值”。
 改进后的公式就是这样
改进后的公式就是这样
∇θJ(θ)≈N1i=1∑Nt=1∑T∇θlogπθ(ai,t∣si,t)Q(si,t,ai,t)
Q function的意思就是当前我在状态st的情况下,采取动作at之后的奖励是多少
V function的意思就是当前我在状态st的情况下,不管采取什么动作之后的平均奖励是多少
Vπ(st)=Eat∼π[Qπ(st,at)]
然后我们就可以参考之前的baseline的思想改进我们的公式
∇θJ(θ)≈N1i=1∑Nt=1∑T∇θlogπθ(ai,t∣si,t)(Q(si,t,ai,t)−V(si,t))
意义就是比较采取动作at之后的奖励和平均奖励的大小来优化模型,同时也减小方差
然后我们就可以定义Aπ(st,at)(优势函数,Advantage Function)**:
- 公式:Aπ(st,at)=Qπ(st,at)−Vπ(st)
- 含义:这步动作 a 比平均水平好多少?
但是目前我们并不知道Aπ(st,at)是多少,我们想要拟合他,
- 我们最终想求的是 A(优势),因为把它代入梯度公式(PPT左中位置)效果最好。
- 但是 Q 和 V 都是未知的。
- 利用 贝尔曼方程(Bellman Equation) 的思想,我们可以把 Q 写成:
Q(st,at)=r(st,at)+t′=t+1∑TEπθ[r(st′,at′)∣st,at]
Qπ(st,at)≈r(st,at)+Vπ(st+1)
(当前的 Q 值 ≈ 拿到手的奖励 + 下一步局面的价值)
Aπ(st,at)≈r(st,at)+Vπ(st+1)−Vπ(st)
- 结论:只要我们能预测 Vπ(s),我们就可以算出 Q,进而算出 A。
那么问题来了:我们到底该如何计算或估计这个 Vπ(s) 呢?
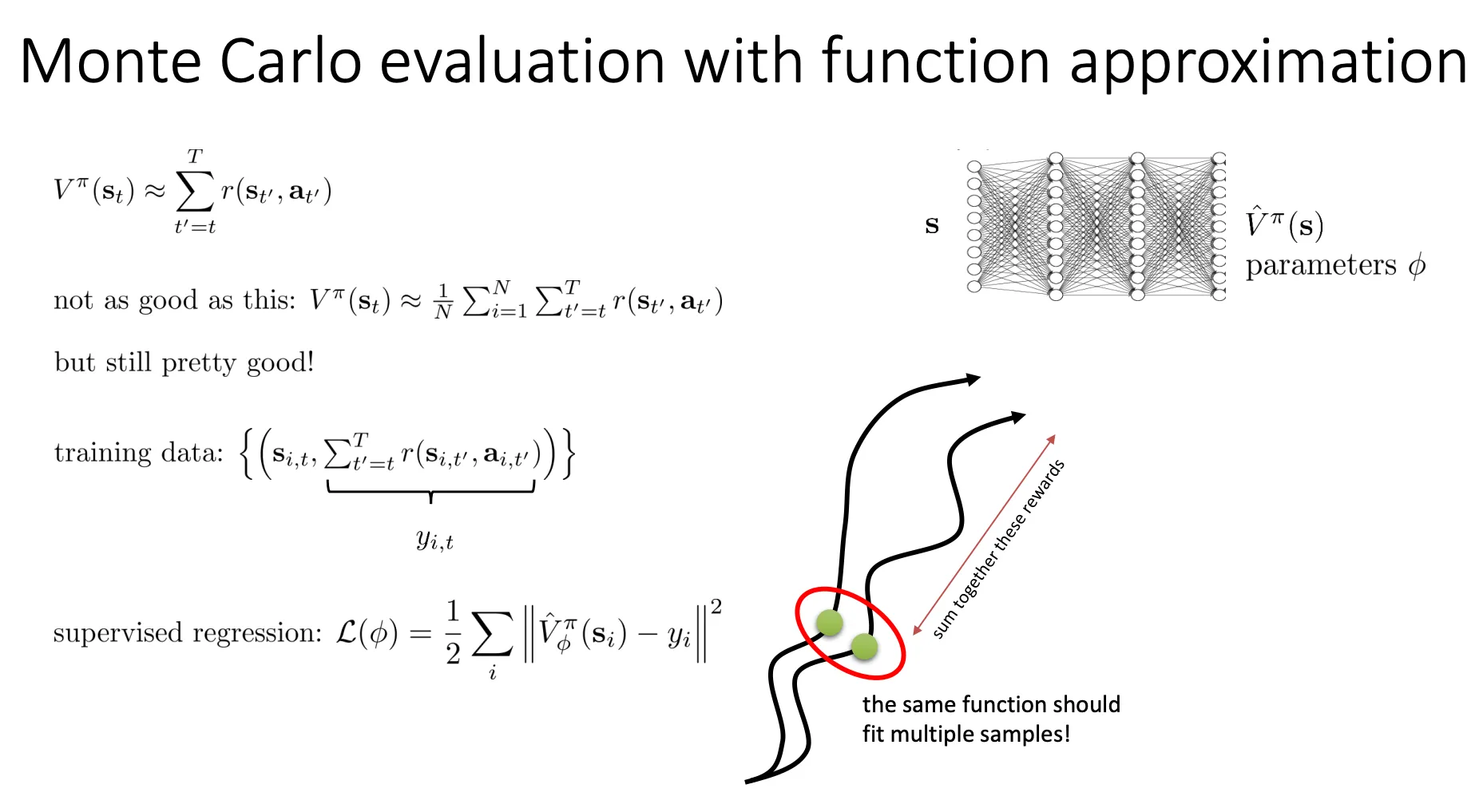
方法:蒙特卡洛评估 (Monte Carlo Policy Evaluation)
- 核心思想:既然我们要算“期望”(平均值),那就多试几次,然后取平均。
- 公式 1(单次采样):
Vπ(st)≈t′=t∑Tr(st′,at′)
这就是说:我不知道平均分是多少,但我刚刚玩了一把,拿了 50 分,那我就暂时认为这局面的价值是 50 分。
Vπ(st)≈N1i=1∑Nt′=t∑Tr(st′,at′)
这就是说:为了更准一点,我从 st 开始玩 N 把,把这 N 把的分数加起来除以 N。
-
但是如果你想用上面的公式 2 准确估计某一个特定状态 st 的价值,你必须能够让时间倒流,回到 st,重新玩一次,再回到 st,再玩一次……
-
在现实世界中这是不可能的(你不能让机器人摔倒后,时光倒流回摔倒前的那一刻重新尝试)。
-
在模拟器中是可以的(比如游戏存盘点),但效率很低。
 然后我们训练一个神经网络来逼近这个函数,
要准确评估一个状态 V(s),最好是从这个状态出发玩 N 次取平均。但这太慢且不现实。
这张PPT提出了解决方案:
然后我们训练一个神经网络来逼近这个函数,
要准确评估一个状态 V(s),最好是从这个状态出发玩 N 次取平均。但这太慢且不现实。
这张PPT提出了解决方案:
-
不追求单点完美:我们不再试图计算某一个特定状态的完美平均值。
-
依靠神经网络的泛化能力:我们收集很多次游戏的数据,然后训练一个神经网络 V^ϕπ 去拟合这些数据。即使每个数据点只有一次采样的结果(有噪声),神经网络也能学出整体的趋势。
-
输入(Input):状态 si,t。
-
标签(Label / Target):yi,t=∑t′=tTr(si,t′,ai,t′)。
- 这里的 yi,t 就是我们在那一次实际游戏中,从 t 时刻开始一直到结束真正拿到的总分。
- 虽然这个 yi,t 只是“一次”的结果(Single Sample),并不是真正的期望值(Expectation),但PPT承认它 “still pretty good”(仍然很好用)。
既然有了输入和标签,这就变成了一个标准的监督回归问题(Supervised Regression)。
PPT 下方的公式展示了训练目标:
L(ϕ)=21i∑∥V^ϕπ(si)−yi∥2
- V^ϕπ(si):神经网络当前的预测值(它认为这个状态值多少分)。
- yi:实际拿到的分。
- 目标:调整网络参数 ϕ,让预测值尽可能接近实际拿到的分(最小化均方误差)。
右下角的图非常形象地解释了为什么这样做行得通:
- 图中展示了多条黑色的轨迹(Samples)。
- 红圈圈出的部分显示,不同的轨迹可能会经过相似的状态区域。
- 这意味着,虽然我们在某一条轨迹上只看到了状态 s 一次,但神经网络会通过学习成千上万条轨迹,把附近的点都“平滑”起来,从而学到一个比较准确的价值估计。
Bootstrapped#
我们还可以进一步改进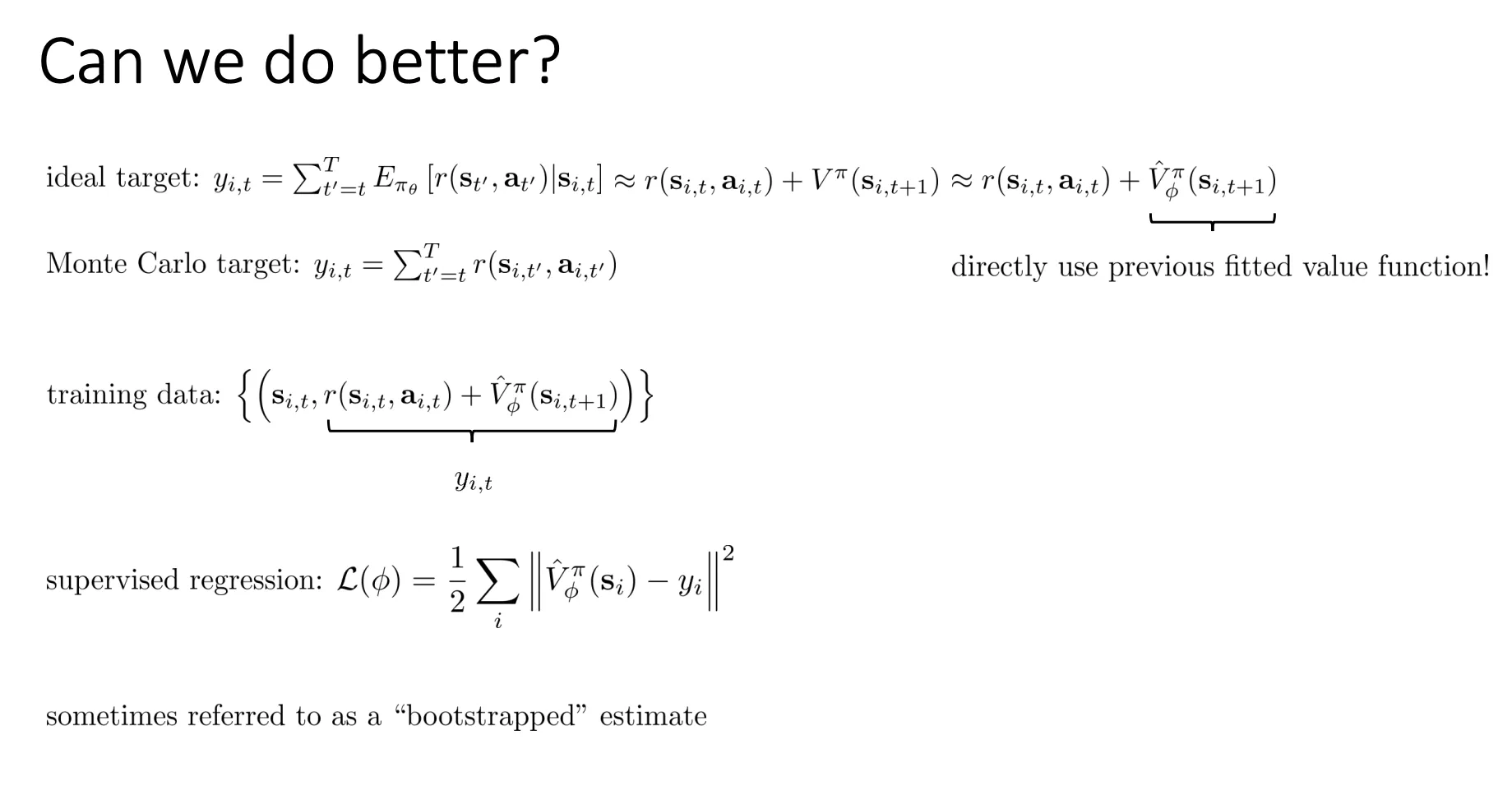 为了训练 Critic,我们要把游戏玩到底,把最后拿到的总分加起来作为标签(Label)。而这张PPT说:我们不需要等到游戏结束,可以利用 Critic 自己对下一步的预测来训练自己。
为了训练 Critic,我们要把游戏玩到底,把最后拿到的总分加起来作为标签(Label)。而这张PPT说:我们不需要等到游戏结束,可以利用 Critic 自己对下一步的预测来训练自己。
yi,t≈r(si,t,ai,t)+V^ϕπ(si,t+1)
- 优点:方差显著降低。原本你要累加未来100步的随机奖励,任何一步的波动都会影响总分。现在你只看当前这一步的奖励,剩下的用一个稳定的估值代替,训练会变得非常平稳。
- 潜在风险:引入了偏差(Bias)。如果你的神经网络 V^ 一开始估得不准,那你算出来的标签也是错的,可能会导致误差传播。
An actor-critic algorithm#
-
有些任务是有尽头的(比如右图的机械臂堆积木,堆完就结束,称为 Episodic tasks)。但也有些任务是无限循环的(比如右图那个一直跑的小人,或者走路机器人,理论上可以永远走下去,称为 Continuous/cyclical tasks)。
-
如果任务无限长,且每一步都有正向奖励(比如只要站着不倒就 +1 分),那么你把未来的分加起来,V 值就会变成无穷大(Infinitely large)。这就导致神经网络没法训练了(梯度爆炸)。
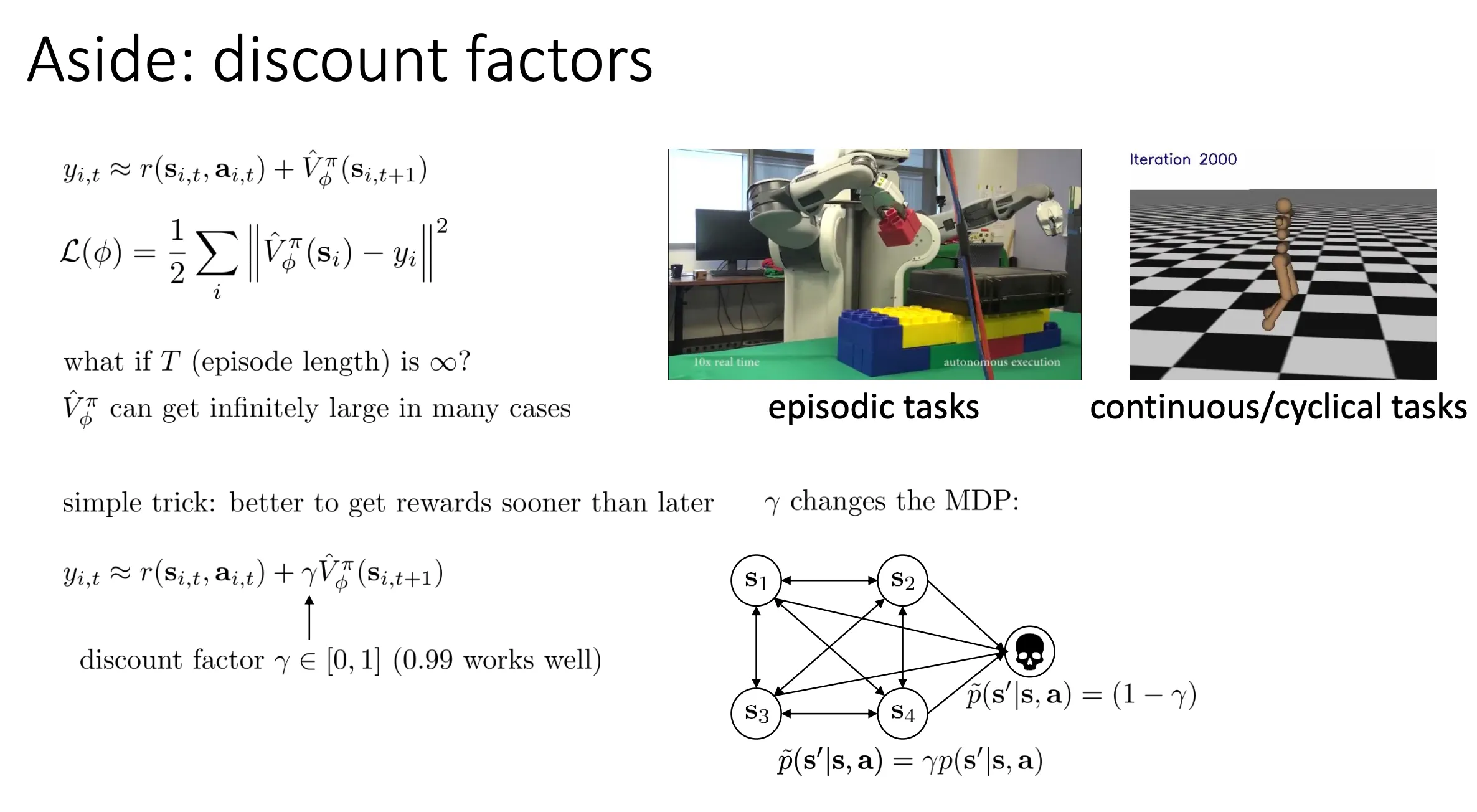 于是乎我们可以给奖励乘一个折扣因子γ ,折扣因子 γ(比如 0.99)是每过一步乘一次。离现在越远,打折越狠。
于是乎我们可以给奖励乘一个折扣因子γ ,折扣因子 γ(比如 0.99)是每过一步乘一次。离现在越远,打折越狠。
V=r0+γr1+γ2r2+γ3r3+…
举个例子:
- 场景:一条无限长的跑道,分成了格子:格1 → 格2 → 格3 …
- 规则:每向前走一步,得 1分奖励(r=1)。
- 参数:
- 折扣因子 γ=0.9(意味着未来的 1 分只值现在的 0.9 分)。
- Critic 神经网络(当前状态):刚开始训练,还有点笨,它对每个格子的价值估值得乱七八糟。
假设 Critic 目前的心理估值(预测值 V^)如下:
- 它觉得在 格1 的价值是 5.0 分 (V^(s1)=5.0)
- 它觉得在 格2 的价值是 4.0 分 (V^(s2)=4.0)
机器人站在 格1 (s1),决定向前走一步 (a1)。
- 动作:走到 格2 (s2)。
- 奖励:拿到 1 分 (r1=1)。
现在我们手里有了一条数据:{s1,a1,r=1,s2}。
Critic 要利用这条数据来检查自己刚才猜得准不准。
- Critic 原本的预测:我觉得站在 s1 能拿 5.0 分。
- 计算 TD Target:
实际上,我拿到了 1 分 现钞,而且我到了 s2。
根据我(Critic)对 s2 的估值,未来还能拿 4.0 分,但这 4.0 分要打折。
目标值 (Target)yyyy=当前奖励+γ×下一步的估值=r1+0.9×V^(s2)=1+0.9×4.0=1+3.6=4.6
- 结论:
- Critic 原本以为 s1 值 5.0 分。
- 实际走了一步后发现,基于目前的认知,s1 其实只值 4.6 分。
- 误差 (TD Error):4.6−5.0=−0.4。
- 训练 Critic:告诉神经网络,“你下次看到 s1,别猜 5.0 了,往下调一点,猜 4.6 吧。”
现在来看看蒙特卡洛的情况
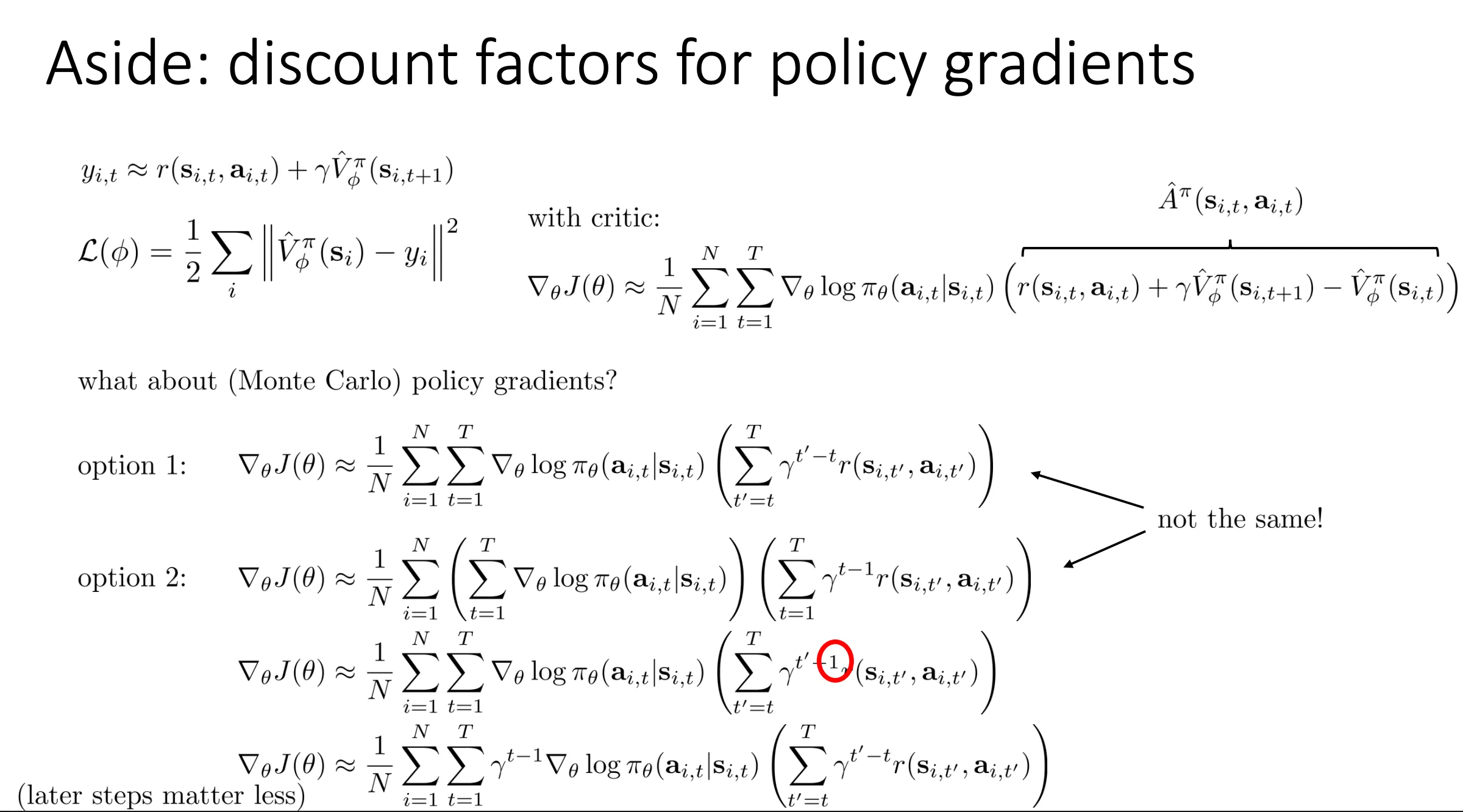
我们可以得到两个公式option 1和option 2
这两个公式在数学形式上非常相似,但在**“物理意义”和“训练效果”上有着本质的区别。
简单来说,差别在于:你是否认为“游戏后期的动作”比“游戏开头的动作”更不重要?
我们来详细拆解一下:
⋯t=1∑Tγt−1∇θlogπ(…)
注意这里有一个 γt−1(PPT 里用红圈或者箭头特别指出的部分)。这代表第 t 步的梯度,要乘上一个随时间指数级衰减的系数。
⋯t=1∑T∇θlogπ(…)
这里没有 γt−1。这意味着第 1 步的梯度和第 1000 步的梯度,权重是一样的(都是 1)。
如果你严格按照“最大化初始状态的期望回报”这个数学目标去求导,你会得到 Option 2。
-
含义:它认为当下的动作最重要,未来的动作越来越不重要。
-
例子:假设 γ=0.99。
- 第 1 步的权重是 1。
- 第 100 步的权重是 0.9999≈0.37。
- 第 1000 步的权重是 0.99999≈0.00004。
-
后果:模型会极其重视开局,但几乎完全忽略后期。即使你在第 1000 步犯了一个导致“死亡”的低级错误,因为权重只有 0.00004,神经网络也懒得去改它。这会导致模型学不会处理长序列任务的后期阶段。
但是option 1我们在代码里实际使用的方法。我们人为地去掉了那个 γt−1。
- 含义:它认为无论你在第几步,只要你还活着,当下的决策就同等重要。
- 逻辑:虽然“未来的钱”要打折(计算 Reward-to-go 时依然有 γ),但是“学习的机会”不应该打折。第 1000 步的状态 s1000 和第 1 步的状态 s1 都是合法的状态,都需要学习最优策略。
- 后果:模型在整个游戏过程中都能均衡地学习
我们可以将这个策略运用到online的场景下,我们不收集一个batch来训练,而是每走一步我们就训练一次,实时和环境交互
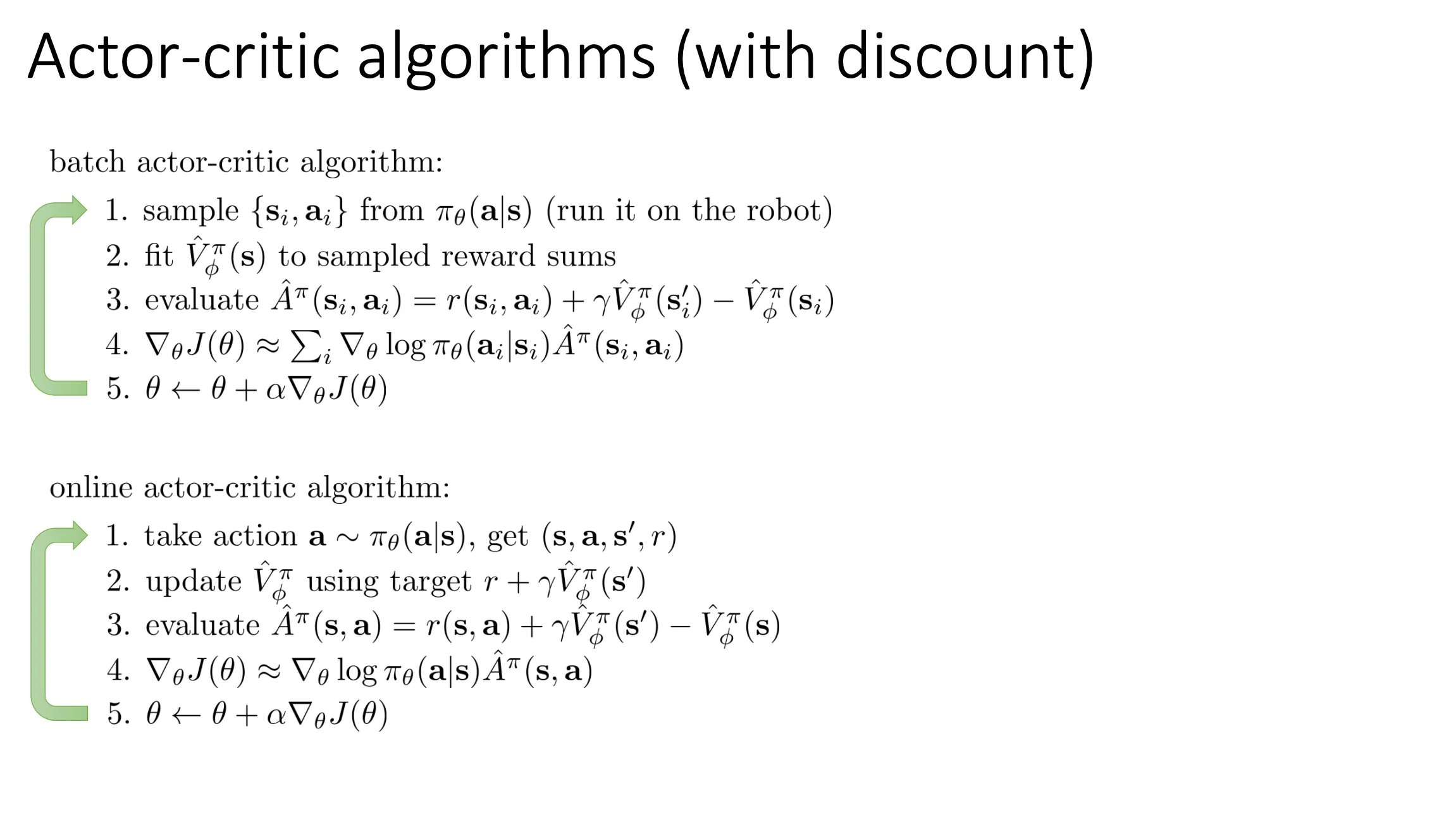 Online RL (在线强化学习)这是最经典的强化学习模式。
Online RL (在线强化学习)这是最经典的强化学习模式。
- 定义: 智能体一边学习,一边与环境进行交互。
- 核心流程:
- 智能体根据当前的策略 π 采取动作 a。
- 环境反馈新的状态 s′ 和奖励 r。
- 智能体利用这些新产生的数据 (s,a,r,s′) 来更新策略。
- 重复上述过程。
- 特点:
- 数据是动态的: 随着策略的变好,智能体产生的数据分布也会发生变化。
- 探索(Exploration): 智能体可以主动去尝试未知的动作,以发现更好的策略。
- 缺点: 样本效率通常较低,且在真实物理环境(如昂贵的机器人或自动驾驶)中进行“试错”可能非常危险或昂贵。
Offline RL (离线强化学习)也被称为 Batch RL (虽然这两个术语在学术界有细微差别,但通常通用)。
-
定义: 智能体完全不与环境交互,仅使用一个固定的、预先收集好的静态数据集(Dataset)进行训练。
-
核心流程:
- 给定一个历史数据集 D(可能由人类专家、随机策略或其他旧策略产生)。
- 智能体仅在 D 上进行训练,试图学习出一个最优策略。
- 训练结束后,策略才会被部署到环境中进行测试。
-
特点:
-
主要挑战: 分布偏移 (Distributional Shift)。当智能体想要尝试一个数据集中没有的动作(OOD, Out-of-Distribution)时,由于无法通过与环境交互来验证这个动作的好坏,智能体可能会产生极其错误的乐观估计(Extrapolation Error),导致策略失效。
但是在实际应用中,每次只用一个step来进行训练对于神经网络来说并不是很好,单步更新通常方差很大,且数据相关性强。
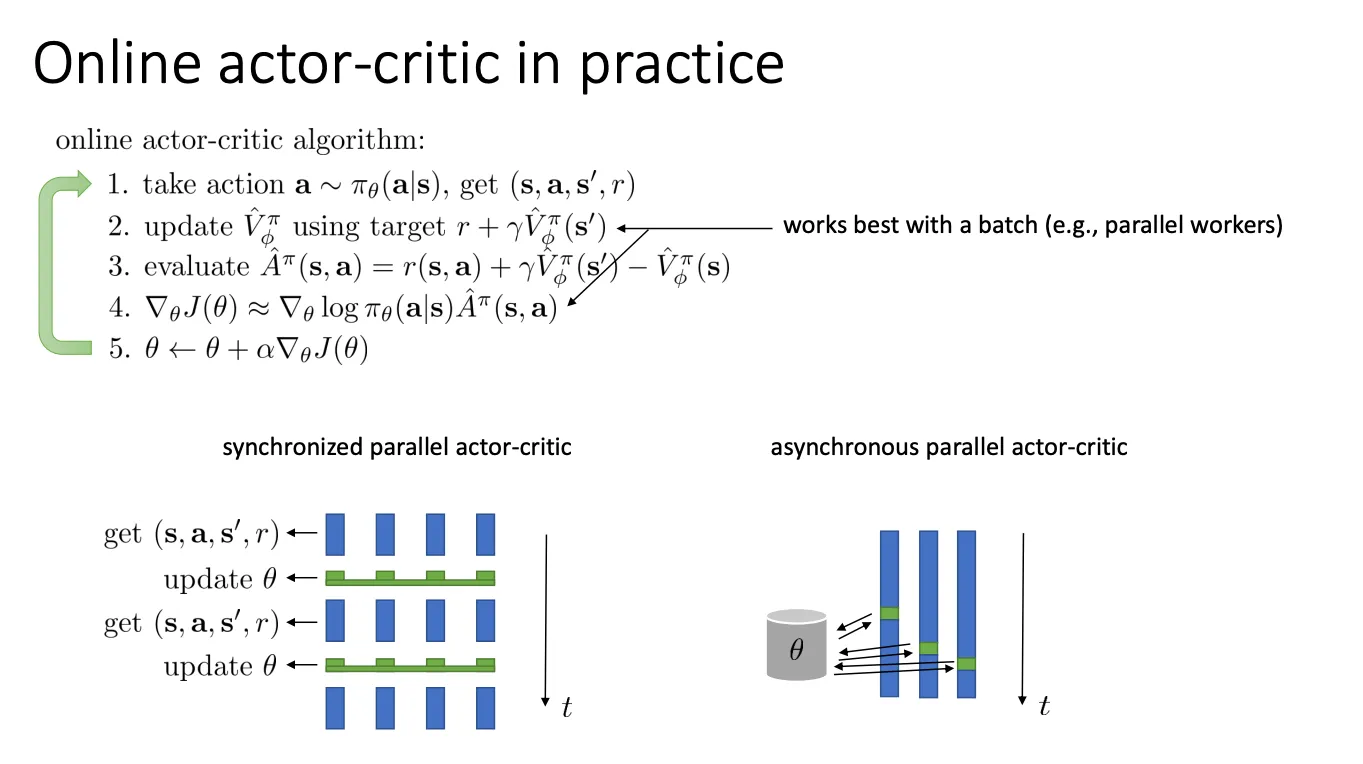 为了解决上述的稳定性问题,PPT 展示了两种主流的并行 Actor-Critic 架构:
为了解决上述的稳定性问题,PPT 展示了两种主流的并行 Actor-Critic 架构:
左图:Synchronized Parallel Actor-Critic (同步并行) -> 对应 A2C
- 工作原理:
- 你有多个并行的环境(Worker,蓝色的竖条)。
- Get (s, a, s’, r): 所有 Worker 同时与各自的环境交互,收集数据。
- Wait: 系统必须等待所有 Worker 都完成这一步。
- Update θ: 收集所有 Worker 的数据,取平均或总和,计算出一个总的梯度,然后更新全局参数。
- 更新完后,所有 Worker 同步进入下一步。
- 特点: 协调一致,利用 GPU 批处理效率高,实现简单(通常比右边的更好用且效果不差)。
右图:Asynchronous Parallel Actor-Critic (异步并行) -> 对应 A3C
- 工作原理:
- 有一个全局参数服务器(灰色圆柱体 θ)。
- 每个 Worker(蓝色竖条)独立运行,互不等待。
- 当某个 Worker 收集够一定量的数据(或者完成一步),它就计算自己的梯度,异步地推送到全局服务器更新参数,并拉取最新的参数。
- 特点: 速度极快(因为不需要等待慢的 Worker),不需要 GPU 也可以在多核 CPU 上跑得很好。但由于参数更新是异步的,可能会出现“过时梯度”(Stale Gradients)的问题,导致训练有时不如 A2C 稳定。
off-policy Actor-Critic#
我们还可以使用off-policy,这样子就可以避免用完一条数据就丢弃,提高数据的利用率。
 思想就是每次跑新的策略得到的结果放到buffer里面,然后每次训练就从buffer里面拿一个batch来训练。
思想就是每次跑新的策略得到的结果放到buffer里面,然后每次训练就从buffer里面拿一个batch来训练。
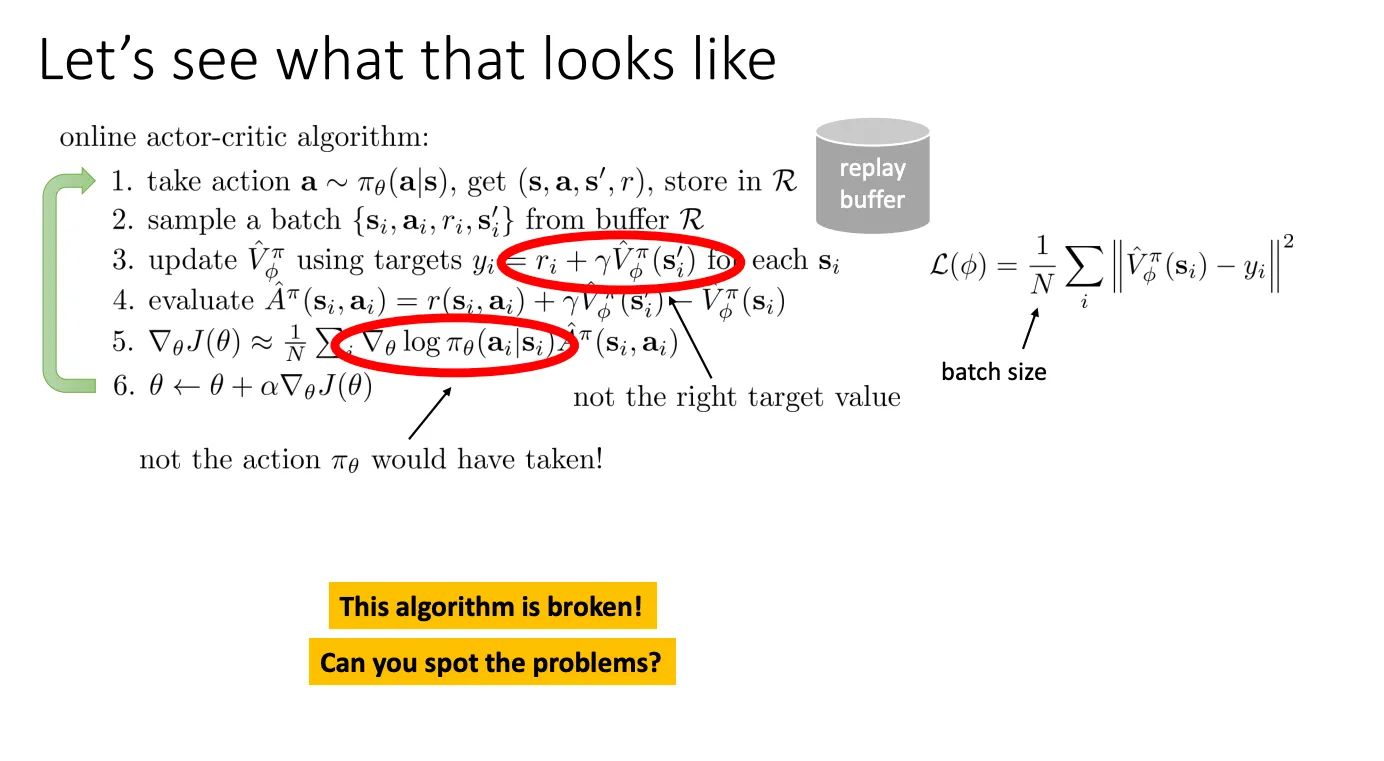
但是如果只是把这种做法嵌套进原有的框架里面会有问题
- Critic 更新的问题 (Step 3)
- 公式含义: 这一步是在更新 Critic(价值函数 V),使用的是时序差分(TD)目标。
yi=ri+γV^ϕπ(si′)
- 问题所在:
- 定义冲突: Vπ(s) 的定义是:从状态 s 出发,严格按照当前策略 π 行动所能获得的期望回报。
- 实际情况: 这个 yi 里的 ri 是怎么来的?它是执行了旧动作 aold 得到的。
- 后果:
- 这个 Target yi 实际上估计的是 Qπ(si,aold)(即:在状态 s 强行执行旧动作 aold,之后才遵循 π 的价值)。
- 如果我们直接用它来更新 Vπ(s),就会把 Vπ(s) 拉向 Qπ(s,aold)。
- 除非 aold 恰好也是当前策略 πθ 会选的动作,否则这个更新目标就是错的。这意味着 Critic 学不到当前策略的真实价值,只能学到“过去各种杂乱策略的混合价值”。
- Actor 更新的问题 (Step 5)
- 公式含义: 这一步是在计算策略梯度 (Policy Gradient)。
∇θJ(θ)≈N1i∑∇θlogπθ(ai∣si)A^π(si,ai)
- 问题所在:
- 数学假设: 策略梯度定理要求我们在期望 E 中使用的样本 (s,a) 必须是由当前策略 πθ 产生的。也就是说,我们要问的是:“在当前策略下,这个动作好不好?”
- 实际情况: Replay Buffer 里的 ai 是很久以前的旧策略(可能是 πold)选择的。
- 后果: 你在拿着旧策略选择的动作,强行去更新新策略的参数。
- 例如:旧策略在 s 选了 a,结果不错(Advantage 是正的)。公式会告诉新策略 πθ :“嘿,增加选 a 的概率!”
- 但现在的 πθ 可能已经很聪明了,根本不会选 a,或者 a 对于现在的策略来说其实是个坏动作(因为 Critic 也是旧的)。
- 结论: 样本分布不对,算出来的梯度是有偏 (Biased) 的,甚至完全错误的。
为了解决第一个问题
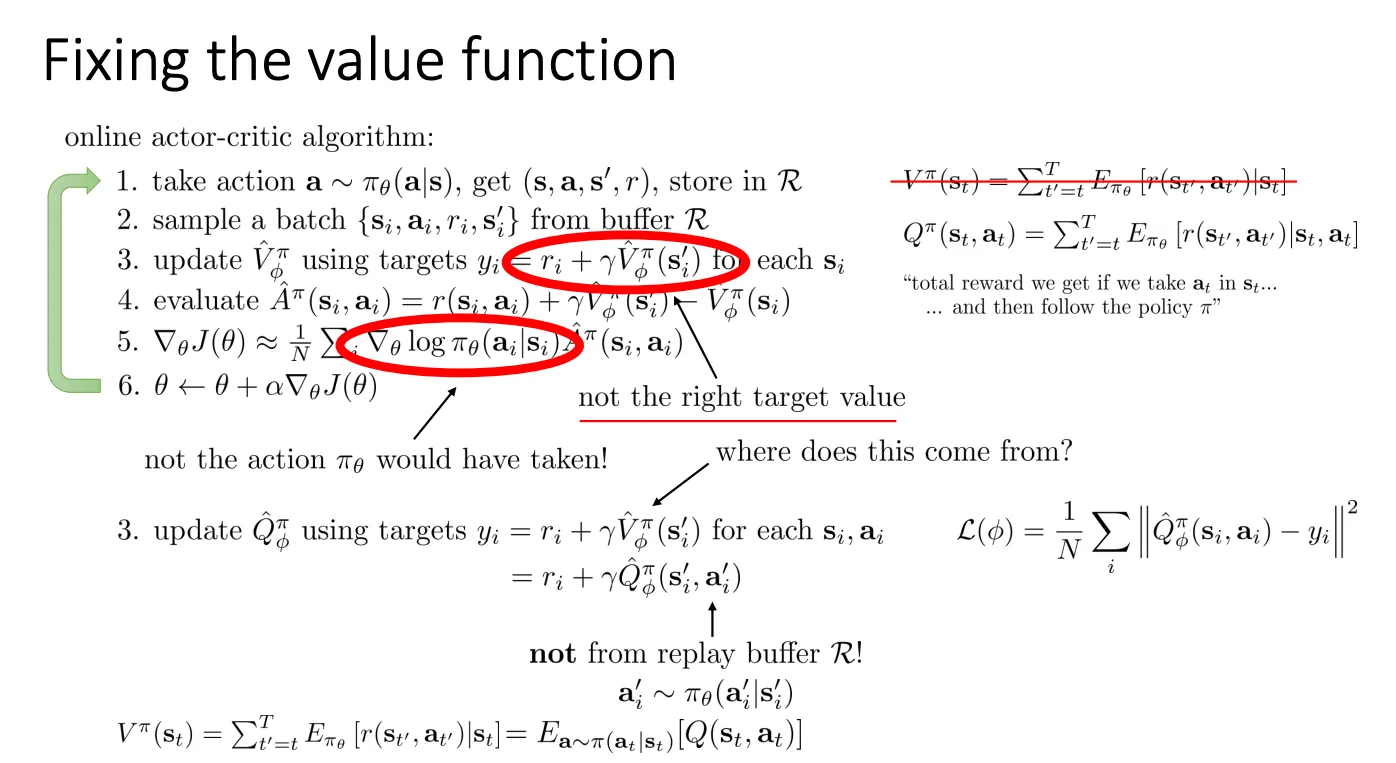
yi=ri+γQ^ϕπ(si′,ai′)
- 这里的 ai′ 从哪来?(核心重点)
- PPT 用箭头特别指出:“not from replay buffer R!”
- Buffer 里虽然存了下一步动作 a′,但那是“旧策略”在当时选的,我们不能用。
- Correct Way: 我们要把 si′ 拿出来,输入给当前最新的 Actor,让它现选一个动作:
ai′∼πθ(ai′∣si′)
- **含义:** 虽然 $s_i$ 和 $a_i$ 是历史数据,但在计算“未来期望”时,我是用**现在的策略**去推演下一步的。这样算出来的 Target 才是属于当前策略的。然后让 $Q(s, a)$ 去拟合这个 Target。
plaintext对于第二个问题
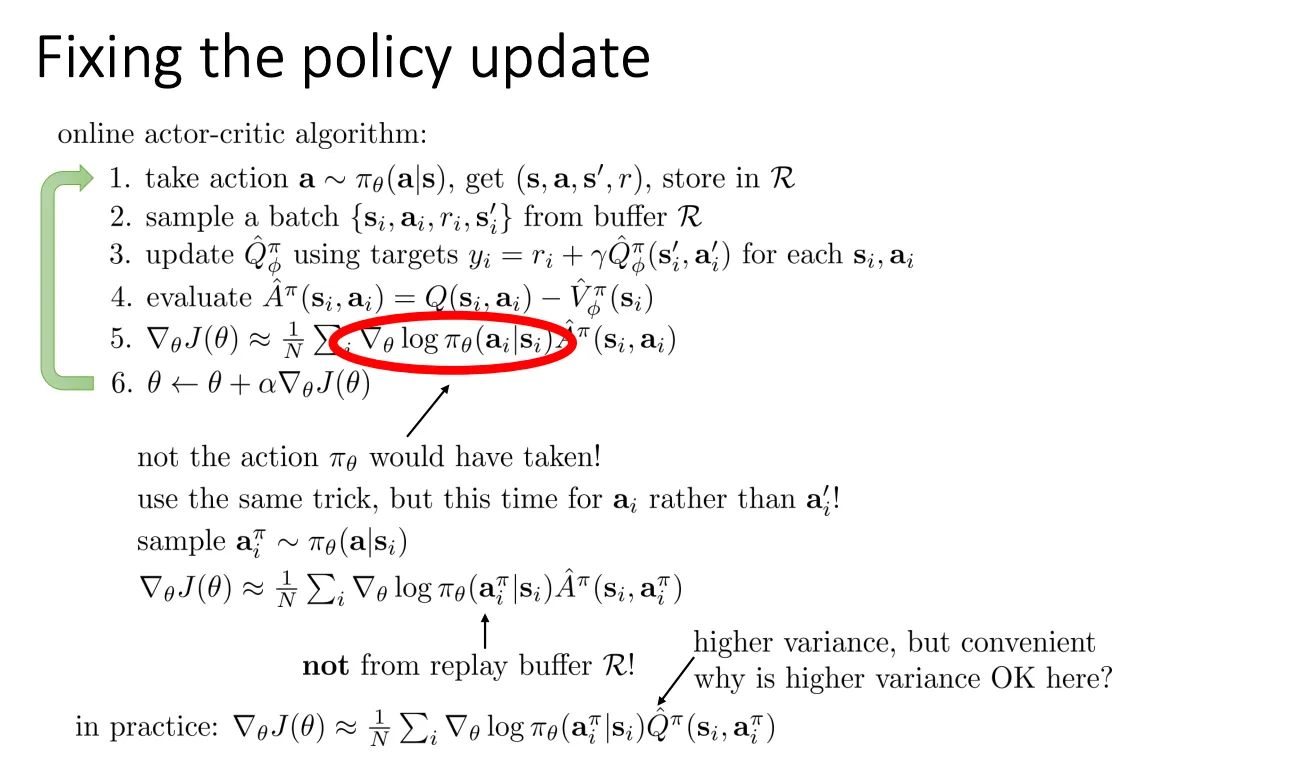 既然旧动作不能用,那就扔掉它,只保留旧状态。
既然旧动作不能用,那就扔掉它,只保留旧状态。
- 保留状态 (si):从 Replay Buffer 中拿出当时的“场景” si。
- 重采样动作 (aiπ):让当前的策略 πθ 面对这个旧场景 si,重新做一次决策,生成一个新的动作 aiπ
aiπ∼πθ(a∣si)
- 计算梯度:用这个新生成的动作 aiπ 和它对应的 Q 值 Q^π(si,aiπ) 来计算梯度。
- 注意:这里不再需要 Importance Sampling(重要性采样),因为动作本来就是从当前分布采出来的。
PPT 最下方给出了修正后的最终公式:
∇θJ(θ)≈N1i∑∇θlogπθ(aiπ∣si)Q^π(si,aiπ)
- 含义: 我们希望调整参数 θ,使得策略 πθ 更倾向于选择那些 Q 值(由 Critic 预测)高 的动作。
- 数据流变化:
- Old: Buffer (s,a,r,s′)→ Update Actor using a.
- New: Buffer (s,_,_,_)→ Sample new aπ using Actor → Evaluate Q(s,aπ) → Update Actor.
相比于直接使用 Buffer 里的真实回报(Return),这里我们使用了一个“采样出来的动作”加上“Critic 预测的 Q 值”来计算梯度。
- Convenient: 不需要处理复杂的 Importance Sampling 权重(那些权重容易爆炸)。
- Higher Variance: 因为我们每次算的梯度都依赖于当次随机采样的动作 aiπ,这是一次随机估计,所以会有方差。但在大规模数据训练中,我们可以不断的输入状态s然后得到很多的a,这个过程不需要仿真获得也不需要和真实世界交互所以获取很容易,这种方差是可以被接受和平均掉的。
问题现在就是,V相比Q到底是哪里不行呢?
- Vπ(s) (状态价值):
它的定义是:“如果不换算成具体动作,站在状态 s,按照策略 π 平均能拿多少分。”
- 数学表达:Vπ(s)=∑aπ(a∣s)⋅Qπ(s,a)
- 它把策略 π “内卷” 进了价值里。如果你换了策略(比如从 πold 换到 πnew),V 的值本身就应该剧烈变化,因为动作分布变了。
- Qπ(s,a) (动作价值):
它的定义是:“在状态 s,强制执行动作 a(不管策略喜不喜欢这个动作),然后再按照策略 π 继续走,能拿多少分。”
- 优势: 它把第一步的动作 a “固定” 了。这一步不再依赖策略的概率分布。
Critics as baselines#
State-dependent#
我们还可以把Critics当作baseline
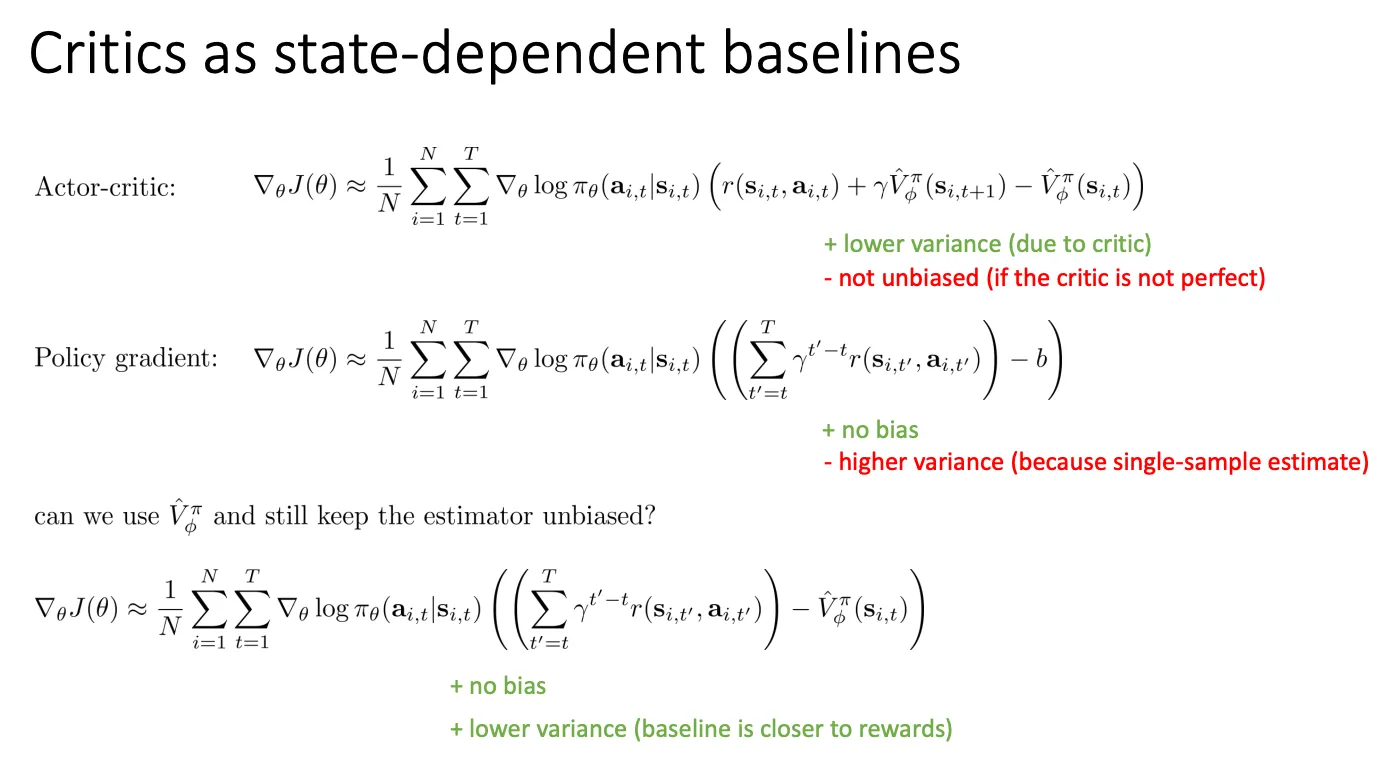
1. Actor-Critic (最上方公式)#
∇J≈...(r+γV^(s′)−V^(s))
这是标准的 Actor-Critic 更新方式。
- 做法: 使用 Bootstrapping(自举)。也就是用 Critic 对未来的预测 V(s′) 来代替真实的未来回报。
- 优点 (+ lower variance): 方差低。因为你只需要看一步真实的 r,剩下的都交给 Critic 预测,随机性小。
- 缺点 (- not unbiased): 有偏差。我们希望优化的目标是真实回报 Gt。而在 Actor-Critic 中,我们用 r+γV^(s′) 来代替 Gt。
E[r+γV^(s′)]=E[Gt]
除非你的 V^ 完美等于真实价值函数 Vtrue(这在训练初期是不可能的),否则这个等式永远不成立。这个差值就是 Bias。
2. Policy Gradient (中间公式)#
∇J≈...((∑r)−b)
这是标准的 Policy Gradient (如 REINFORCE)。
- 做法: 使用 Monte Carlo(蒙特卡洛) 回报。也就是必须等到游戏结束,把后面所有的奖励加起来作为回报。
- 优点 (+ no bias): 无偏差。因为使用的是真实发生的累计回报,数学期望上是绝对准确的。
- 缺点 (- higher variance): 方差高。因为一局游戏很长,任何一步的随机因素都会累积,导致最终的 Sum Reward 波动极大。
3. State-Dependent Baseline (最下方公式)#
∇J≈...((∑r)−V^(s))
这是 PPT 提出的折中方案 —— 带基线的策略梯度 (Policy Gradient with Baseline)。它试图回答:“能不能既用 Critic 降方差,又保持无偏差?”
- 做法:
- Target 部分(被减数): 依然使用真实的蒙特卡洛回报 ∑r(保持无偏差)。
- Baseline 部分(减数): 使用 Critic V^(s) 作为一个基线减去。
- 为什么这样好?
- + no bias: 因为 Critic 只是作为 Baseline 被减去,根据数学推导(Control Variate 理论),减去一个不依赖于动作 a 的项不会改变梯度的期望方向,所以依然是无偏的。
- + lower variance: 虽然不如第一种方法方差那么低,但因为 V^(s) 能够预测回报的大致范围,减去它之后,剩下的差值(Advantage)数值会变小,从而显著降低了梯度的波动。
- 只要 Baseline b(s) 只与状态 s 有关,而与动作 a 无关,它对梯度的期望贡献为 0。
证明逻辑如下:
Ea∼π[∇θlogπ(a∣s)⋅b(s)]
因为 b(s) 和 a 无关,可以提出来:
=b(s)⋅Ea∼π[∇θlogπ(a∣s)]
=b(s)⋅a∑π(a∣s)π(a∣s)∇π(a∣s)
=b(s)⋅∇a∑π(a∣s)
因为概率之和 ∑π=1,常数的梯度是 0:
=b(s)⋅∇(1)=0
结论: 在第三个公式中,V^(s) 只是作为一个 Baseline 被减去。根据上述证明,它在数学期望上会被抵消掉(也就是不会改变梯度的平均方向),所以它是 Unbiased(无偏) 的。它唯一的作用就是降低方差。
action-dependent#
上述的方法只是将state引入预测然后作为baseline,如果我们能用 Q(s,a) 做 Baseline 呢?
- Q(s,a) 是针对具体动作的预测价值。
- 如果我们计算 Return−Q(s,a),理论上这个差值(Advantage)会非常小(接近于 0 或仅剩环境噪声)。
- 好处: 极大地降低方差 (Lower Variance)。
- 坏处: 直接减去 Q(s,a) 会引入 Bias(偏差)。
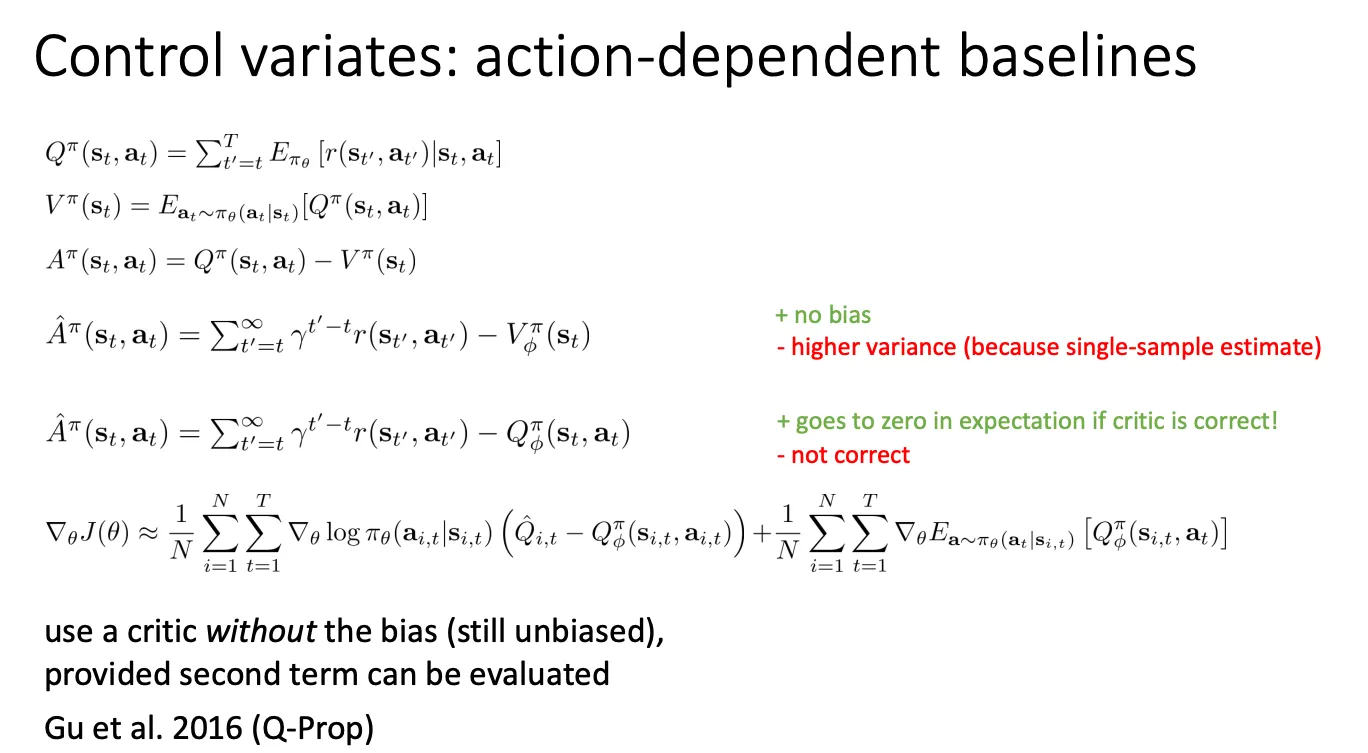 我们的终极目标是计算 策略梯度 (Policy Gradient) 的无偏估计:
我们的终极目标是计算 策略梯度 (Policy Gradient) 的无偏估计:
∇θJ(θ)=Es∼ρ,a∼πθ[∇θlogπθ(a∣s)⋅Qπ(s,a)]
但是他方差大,所以我们引入Q作为baseline,但是这有造成他不能无偏了。
我们构造一个新的梯度估计量 gnew,利用数学恒等式:
X=(X−Y)+Y
取期望:
E[X]=E[X−Y]+E[Y]
在这里:
- X 是我们原本那个方差很大的梯度估计 gtarget。
- Y 是基于 Critic 的梯度估计(作为控制变量),记为 gcritic=∇θlogπθ(a∣s)⋅Qϕπ(s,a)。
我们希望构造一个新的估计量:
gnew=第一部分(gtarget−gcritic)+第二部分E[gcritic]
如果 gtarget 和 gcritic 高度相关(即 Critic 训练得准),那么 (gtarget−gcritic) 的值会非常小,方差也就非常小。
带入一下就是
∇θJ(θ)≈Term 1: 蒙特卡洛残差 (低方差)N1∑∇θlogπθ(a∣s)(Q^−Qϕπ(s,a))+Term 2: 期望修正项 (保证无偏)N1∑∇θEa∼πθ[Qϕπ(s,a)]
n-step returns#
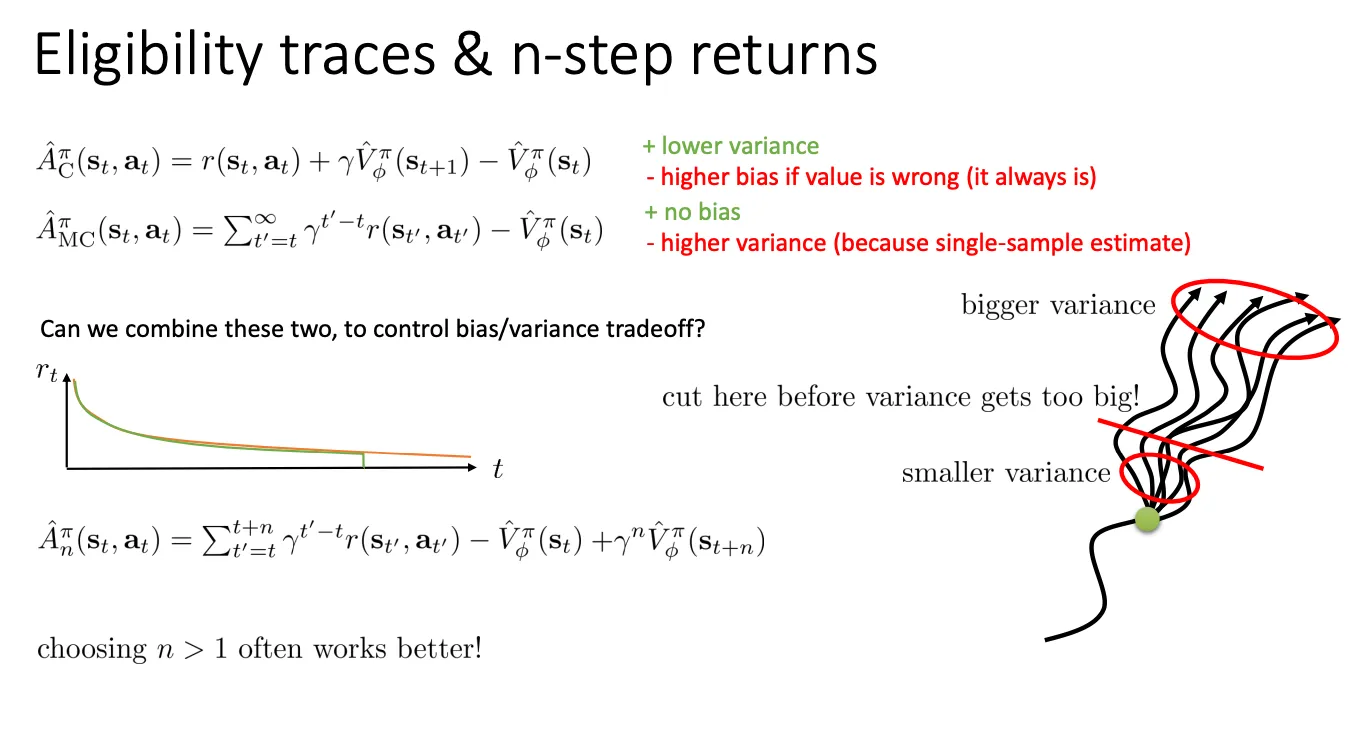
- 方案 A: One-step Actor-Critic (只看一步)
- 公式:A^Cπ=rt+γV(st+1)−V(st)
- 特点: 也就是 TD(0)。我们只用了一个真实的奖励 rt,剩下的全靠 Critic 猜。
- 评价: 方差极低(Lower variance),但偏差很大(Higher bias),因为 Critic 总是猜不准。
- 方案 B: Monte Carlo (看到底)
- 公式:A^MCπ=∑γr−V(st)
- 特点: 必须等到游戏结束,把所有奖励加起来。
- 评价: 无偏差(No bias),但方差极高(Higher variance),因为这一路上任何一个随机扰动都会改变最终结果。
折中方案:N-step Returns (The Solution)
如果我们不只看 1 步,也不看无限步,而是看 N 步(比如 5 步或 10 步),会发生什么?
- 公式
A^nπ=前 N 步使用真实数据t′=t∑t+nγt′−tr(st′,at′)−V(st)+N 步之后使用 Critic 预测γnV^(st+n)
- 含义:
- 你先在这个世界上真实地跑 N 步,收集确凿的奖励证据(这部分是无偏的)。
- 跑到第 N 步的时候,你累了,剩下的路程你不想跑了,于是你问 Critic:“从这儿往后还能拿多少分?”(这部分是有偏的,但因为还要乘以衰减因子 γn,其错误的影响被缩小了)。
右边的树状图非常生动地解释了为什么要“Cut here”(在这里截断)。
- 树根 (Start): 状态是确定的,方差很小。
- 分叉 (Branching): 每走一步,环境都会有随机性,动作也有随机性。路径像树枝一样发散。
- Bigger Variance: 走得越远,可能发生的路径组合就越多,结果的波动(方差)就越不可控。
- Cut Here:
- 如果我们一直走到头(红色大圈),方差会爆炸。
- 如果我们在这里切一刀(红色横线),用 Critic 的预测值来“封口”,就可以把方差控制在一个合理的范围内(Smaller variance)。
我们还可以跟进一步,我们不设定n具体是多少,我们遍历n的所有情况,然后加权累加
A^nπ=t′=t∑t+nγt′−tr(st′,at′)−V(st)+γnV^(st+n)
A^GAEπ=n=1∑∞wnA^nπ
使用指数衰减:wn∝λn−1。
如果我们按照 GAE 的定义直接算,计算量会非常大且复杂。
GAE 的定义是把所有可能的 N-step 优势拿来取指数加权平均:
AGAE=(1−λ)(A(1)+λA(2)+λ2A(3)+…)
- 这里 A(1) 是只看一步的优势。
- A(2) 是看两步的优势。
- 以此类推……
- (1−λ) 是为了让权重之和归一化(等于1)。
如果你直接写代码算这个,你需要先算出 A(1), 再算 A(2), 再算 A(3)……这非常麻烦。
这里就可以有一个数学小trick
我们定义单步误差: δt=rt+γV(st+1)−V(st)
A(1)=δt
A(2)=δt+γδt+1
A(2) 包含了 rt+γrt+1+γ2Vt+2−Vt,中间的 Vt+1 会在 δ 的相加中被消掉。
A(3)=δt+γδt+1+γ2δt+2
现在我们把这些 δ 代回到最开始的加权公式里
AGAE=(1−λ)(A(1)δt+λ(A(2)δt+γδt+1)+λ2(A(3)δt+γδt+1+γ2δt+2)+…)
我们不要按 A(n) 分组,我们按 δ 分组(把所有的 δt 放在一起,所有的 δt+1 放在一起…):
- δt 的系数是多少?
它在每一项里都有。
系数 = (1−λ)(1+λ+λ2+…)
这是一个几何级数求和,(1+λ+λ2+…)=1−λ1。
所以 δt 的总系数 = (1−λ)⋅1−λ1=1。
- δt+1 的系数是多少?
它从第二项开始出现,且带着 γ。
系数 = (1−λ)(λγ+λ2γ+…)
提取公因数 γλ,变成 γλ(1−λ)(1+λ+…)。
结果 = γλ⋅1=γλ。
- δt+2 的系数是多少?
同理推导,结果是 (γλ)2。
经过上面的运算,复杂的加权平均 AGAE 最终变成了极其简单的形式:
AGAE(t)=δt+(γλ)δt+1+(γλ)2δt+2+…
A^GAEπ=∑(γλ)t′−tδt′
RL对数学要求太高了吧。。。。。。(悲)