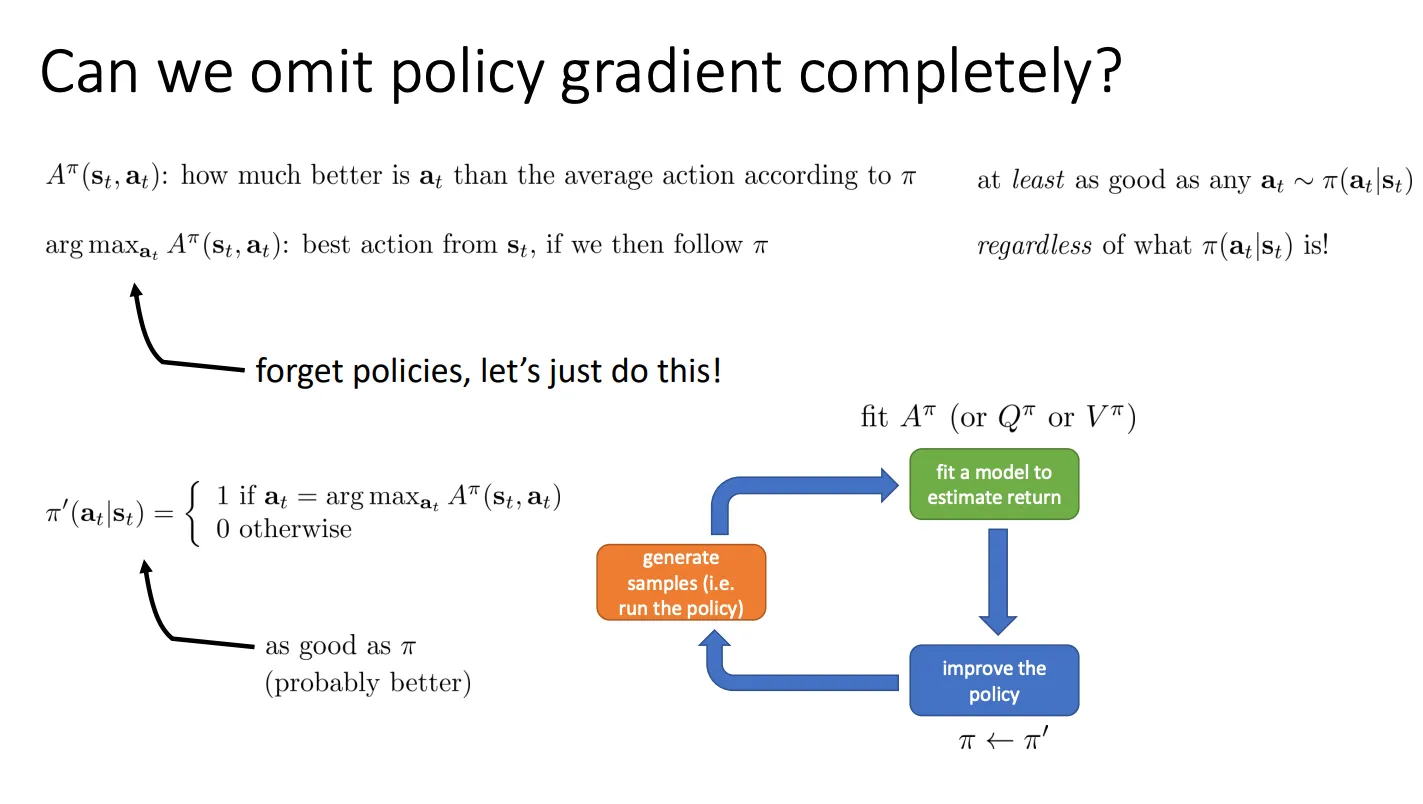
我们是否可以完全抛弃策略梯度(直接优化策略参数的方法),转而通过单纯最大化价值函数来寻找最优策略?
 思路就是
思路就是
既然Aπ(st,at)的意思是:在状态 st 下,采取动作 at 比当前策略 π 的平均表现要好多少,那根据argmaxatAπ(st,at)那我们直接选那个优势最大(即最好的)动作
那么我们的新策略 π′(at∣st) 可以定义为:
- 如果动作 at 是优势最大的那个(argmax),则概率设为 1。
- 其他动作概率设为 0。
Dynamic Programming#
那么现在的问题就是怎么评估Aπ(st,at),评估这个函数其实就是评估V,因为
Aπ(st,at)≈r(st,at)+Vπ(st+1)−Vπ(st)
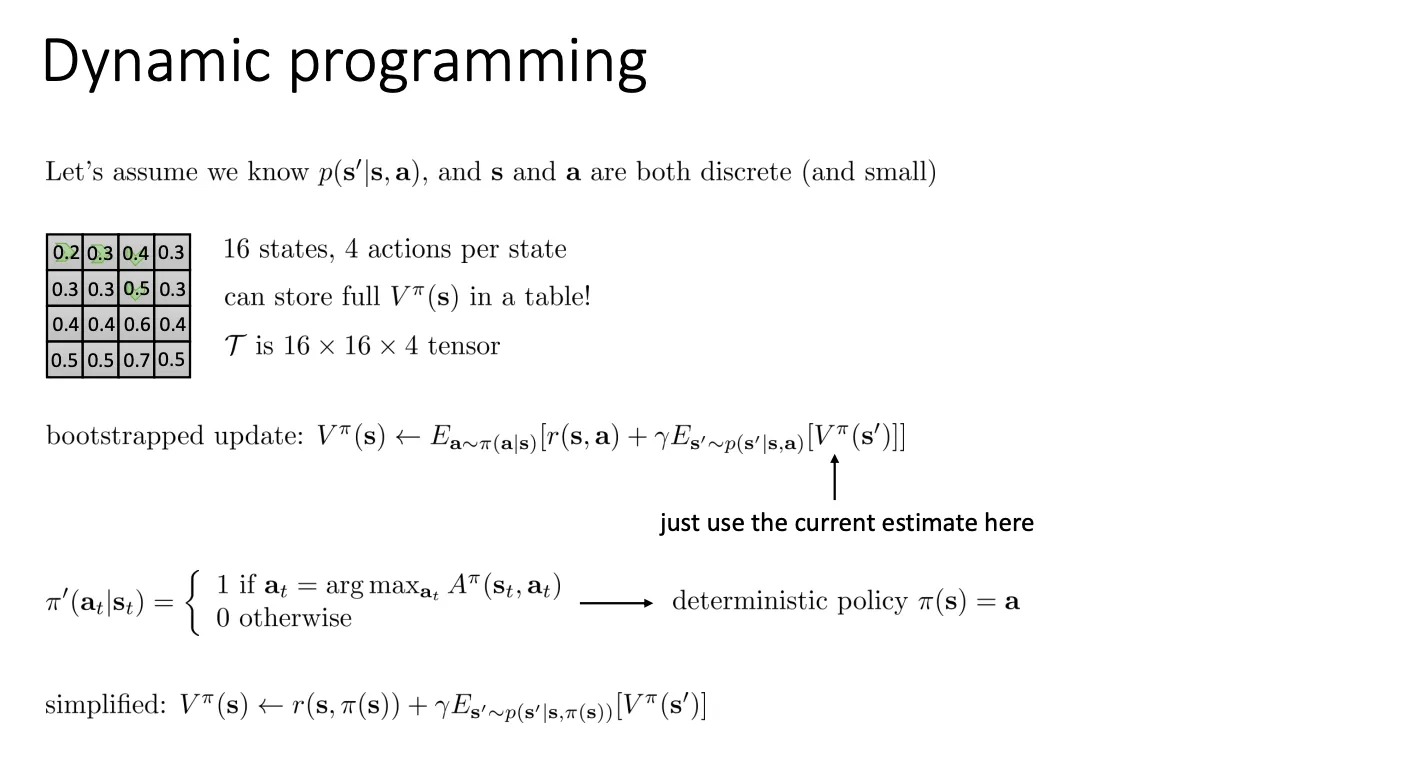
在特定条件下,如何具体实现“通过价值来寻找最优策略”。这个特定方法被称为 动态规划 (Dynamic Programming, DP)。
 假设我们知道
假设我们知道
- p(s′∣s,a):这意味着我们要完全知道环境的模型(Model-Based)。也就是说,我们知道“如果在状态 A 做动作 B,我有多少概率会跳到状态 C”。这就像玩游戏时你手里拿着一本详细的攻略书,知道每一步的所有后果。
- 状态 s 和动作 a 是离散且少量的 (Discrete and small):这意味着不需要神经网络,我们可以用简单的“表格”来存储数据。
表格型强化学习 (Tabular RL)
- 左侧的 4×4 网格:这是一个典型的“网格世界”示例(16个状态)。
- “store full Vπ(s) in a table”:因为状态很少(比如只有16个),我们可以直接画一张表,把每个格子的价值 V 填进去。不需要复杂的近似计算。
- T is 16×16×4 tensor:这是状态转移矩阵。意思是 16个当前状态 × 16个下一个状态 × 4个动作。这就是那个“已知的环境模型”。
更新形式就是
Vπ(s)←E[r+γE(Vπ(s′))]
由于策略是固定的,哪个价值最大我就选哪个,于是我们可以把前面的期望给省去,变成
Vπ(s)←r+γE(Vπ(s′))
于是我们的流程就变成
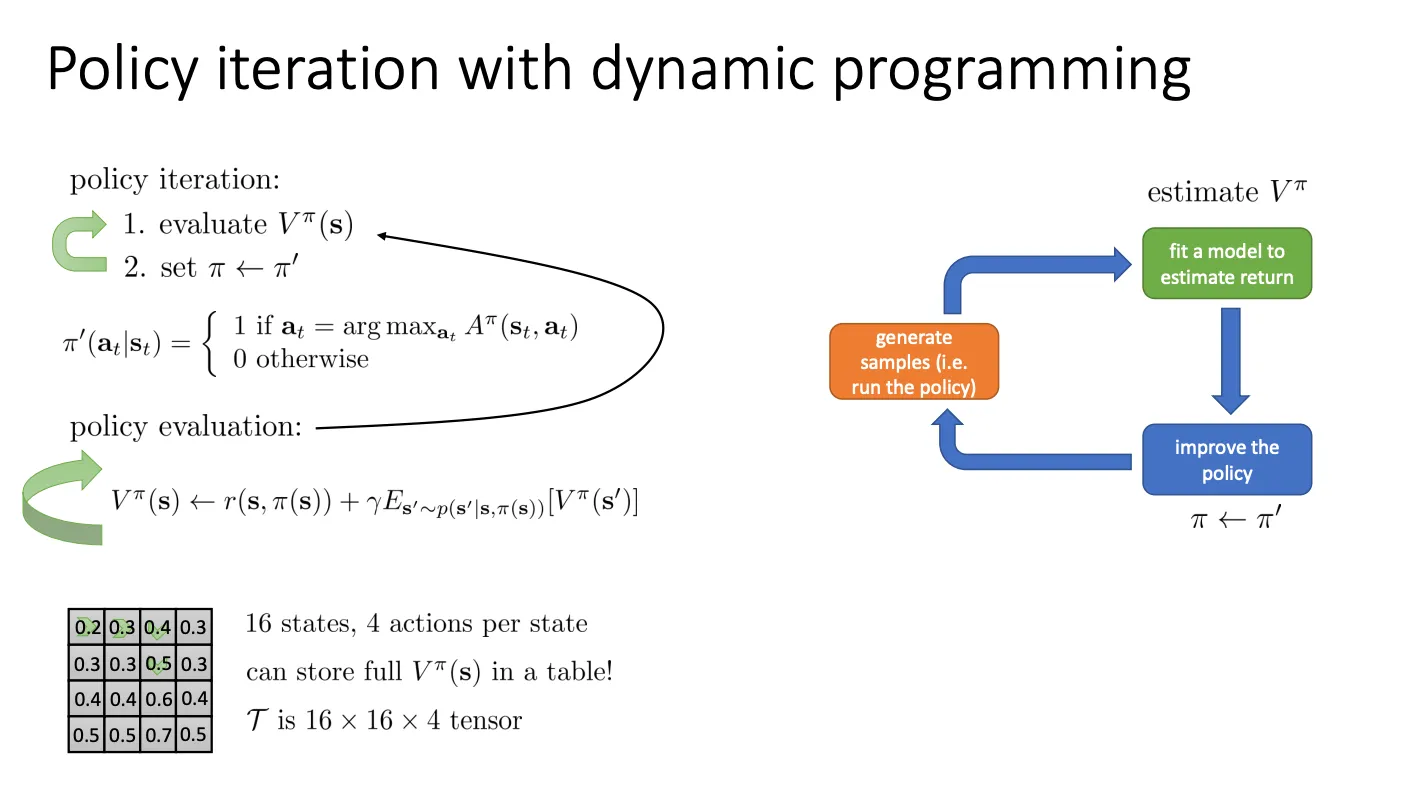
价值迭代算法 (The Value Iteration Algorithm)#
我们还可以进一步简化
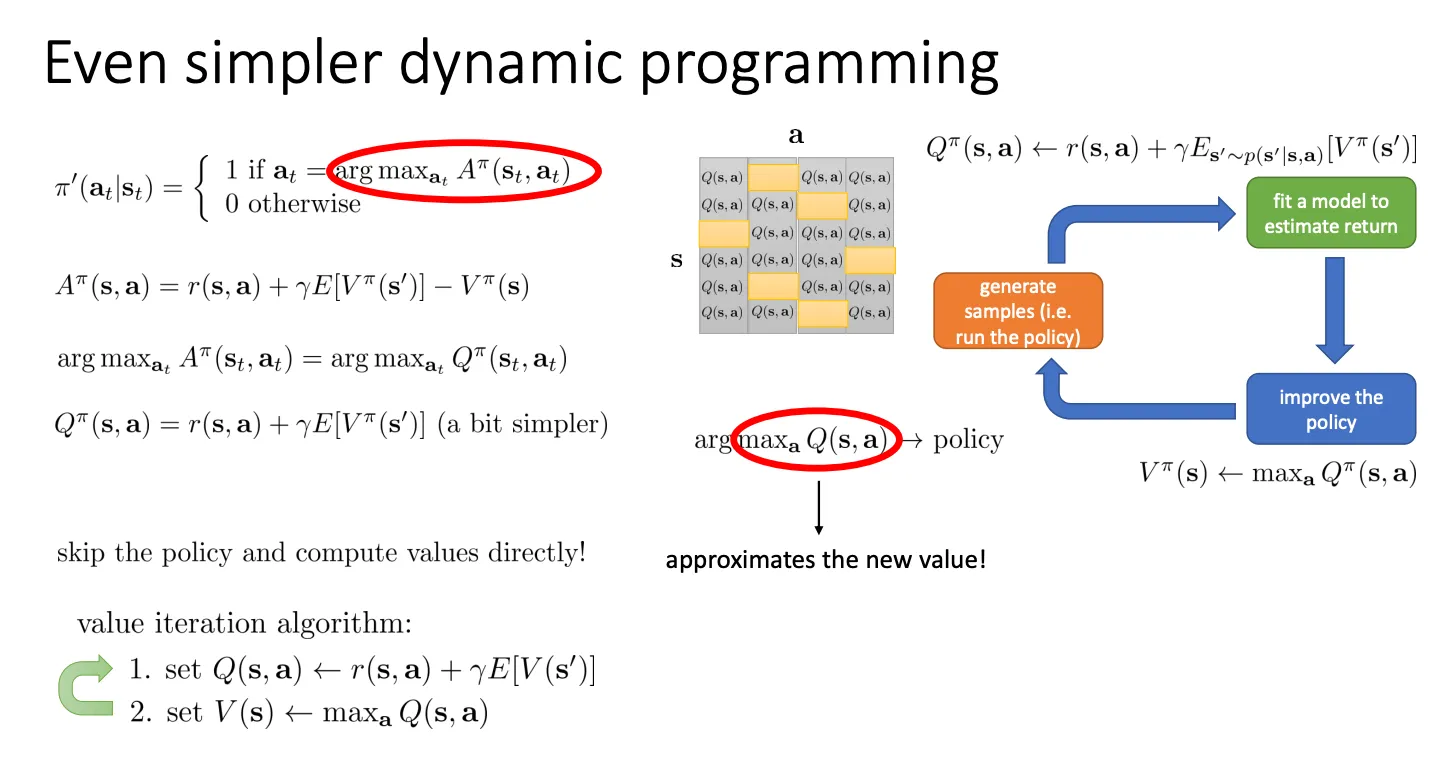 既然我们想要的是argmaxatAπ(st,at),这个其实就等价于argmaxaQπ(s,a)
既然我们想要的是argmaxatAπ(st,at),这个其实就等价于argmaxaQπ(s,a)
argamaxAπ(s,a)=argamaxQπ(s,a)
- 算 Q 值: 针对每一个动作,算它的即时奖励加上未来的折现价值。
Q(s,a)←r(s,a)+γE[V(s′)]
- 更新 V 值(贪婪更新): 既然算出了各个动作的 Q,那我肯定选最大的那个作为这个状态的价值 V。
V(s)←amaxQ(s,a)
这个过程不断循环,直到 V 值不再变化,我们就得到了最优价值函数 V∗,同时也自然拥有了最优策略(每次都选 Q 最大的那个动作)。
Fitted Value Iteration#
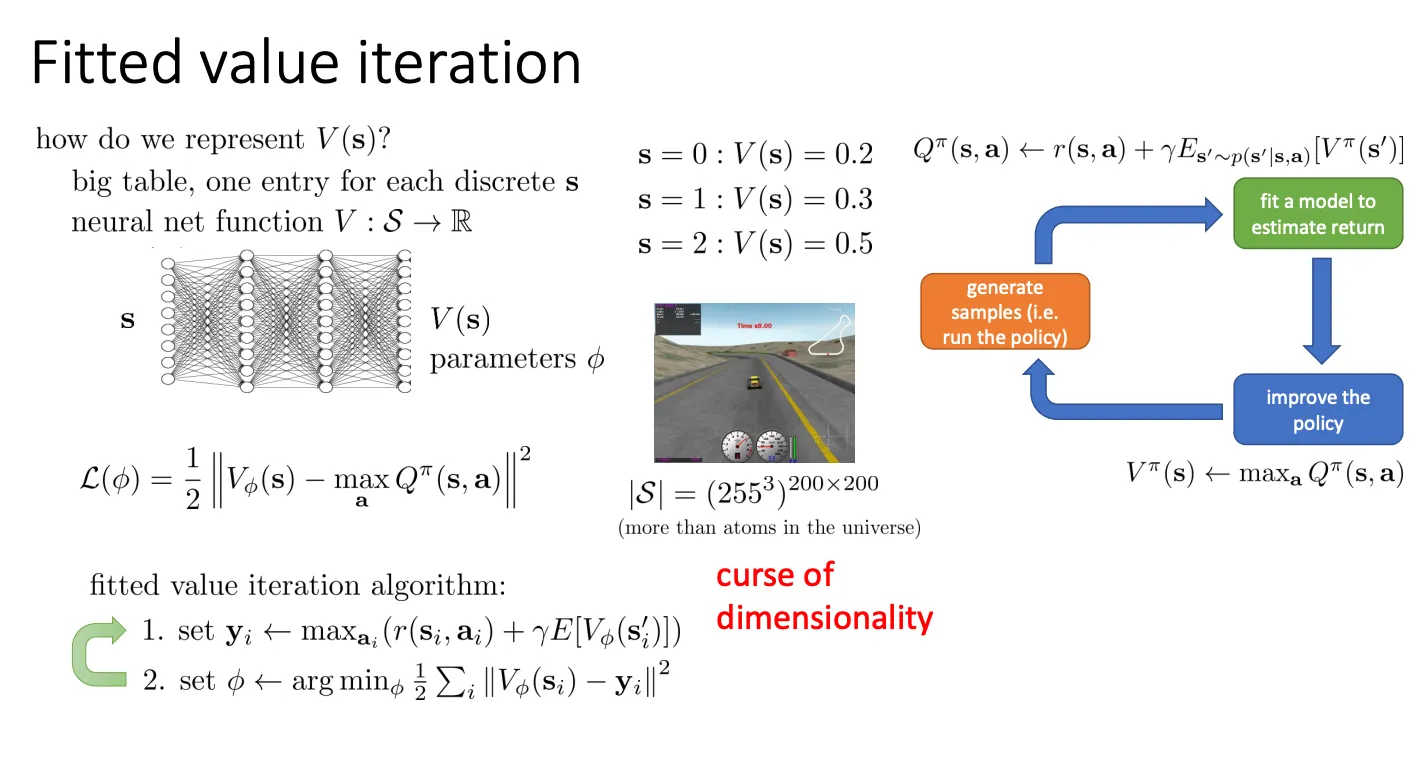 我们肯定不可能维护一个Value table做出我们的决策因为你的state远远不可能用table表示完,于是乎我们就可以像之前的方法一样,用一个神经网络来预测Value,就像图中底下的部分。
我们肯定不可能维护一个Value table做出我们的决策因为你的state远远不可能用table表示完,于是乎我们就可以像之前的方法一样,用一个神经网络来预测Value,就像图中底下的部分。
但是这个算法就有一个问题,他需要我们知道转移函数p(s′∣s,a) 因为第一步的期望哪里,我们从
Es′∼p(s′∣s,π(s))[V(s′)]
这里的分布中计算期望
yi←aimax(r(si,ai)+γE[Vϕ(si′)])
max_a:为了算出一个状态的目标价值 yi,你需要计算所有可能动作 ai 中哪个最好(Max)。- 因为你不知道环境模型,你在状态 si 只能尝试做一个动作,看到一个结果。你无法凭空知道“如果我刚才做了别的动作,结果会是什么”。
Fitted Q-Iteration#
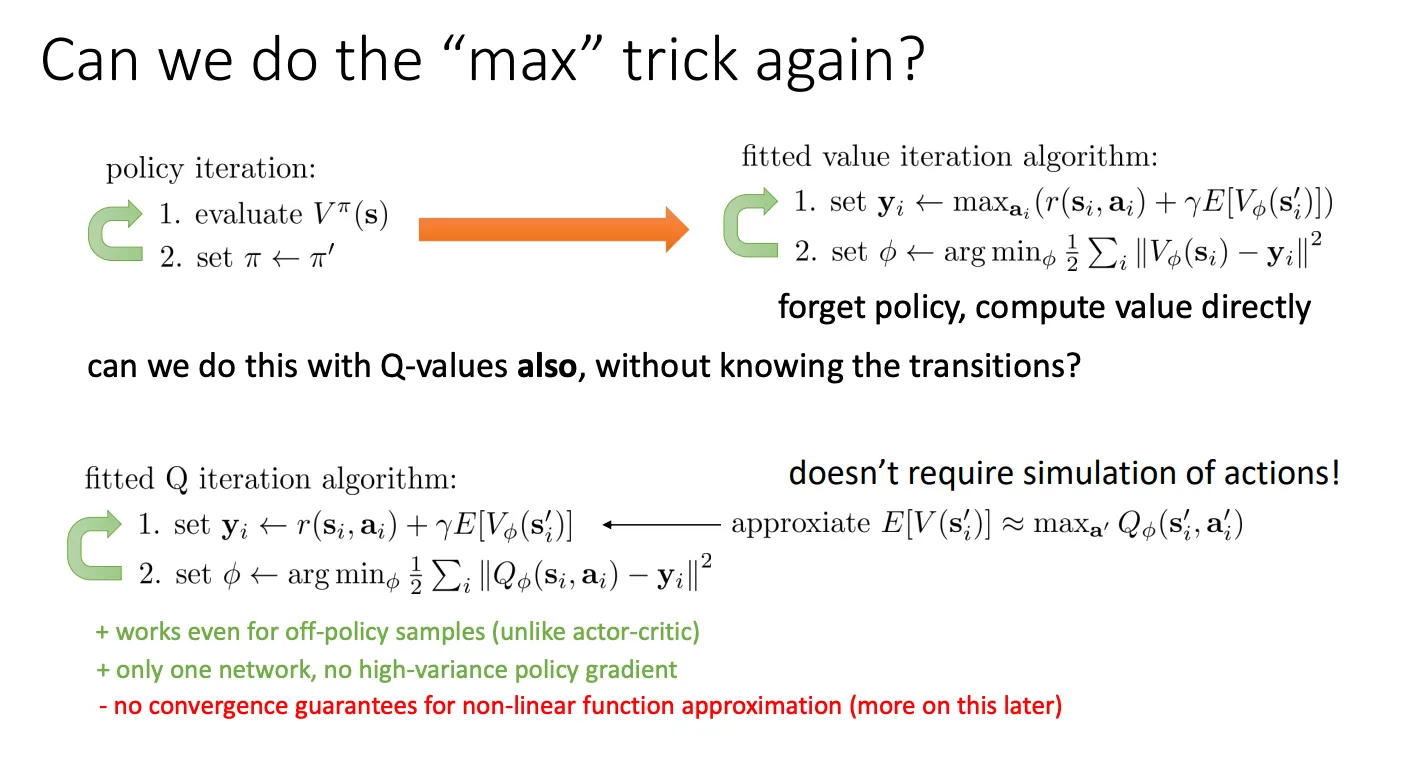 那我们的做法就是
那我们的做法就是
yi←r(si,ai)+γa′maxQϕ(si′,ai′)
- 它用 maxa′Qϕ(si′,ai′) 来近似 E[V(si′)]。
- 不需要环境模型
- 第一步(现在): r(si,ai) 是你采样(sample)得到的真实数据。
- 第二步(未来): maxa′Qϕ(si′,ai′) 是你自己对着网络(或者表格)算的。你不需要去环境里真的执行 a′,你只需要问你的神经网络:“如果我在下一步状态 s′,哪个动作分最高?”
- Doesn’t require simulation of actions! 这行小字就是说:我们在计算未来价值时,完全是在脑子里(神经网络里)算 Max,不需要去现实世界试错。
他最终的训练流程就是这样
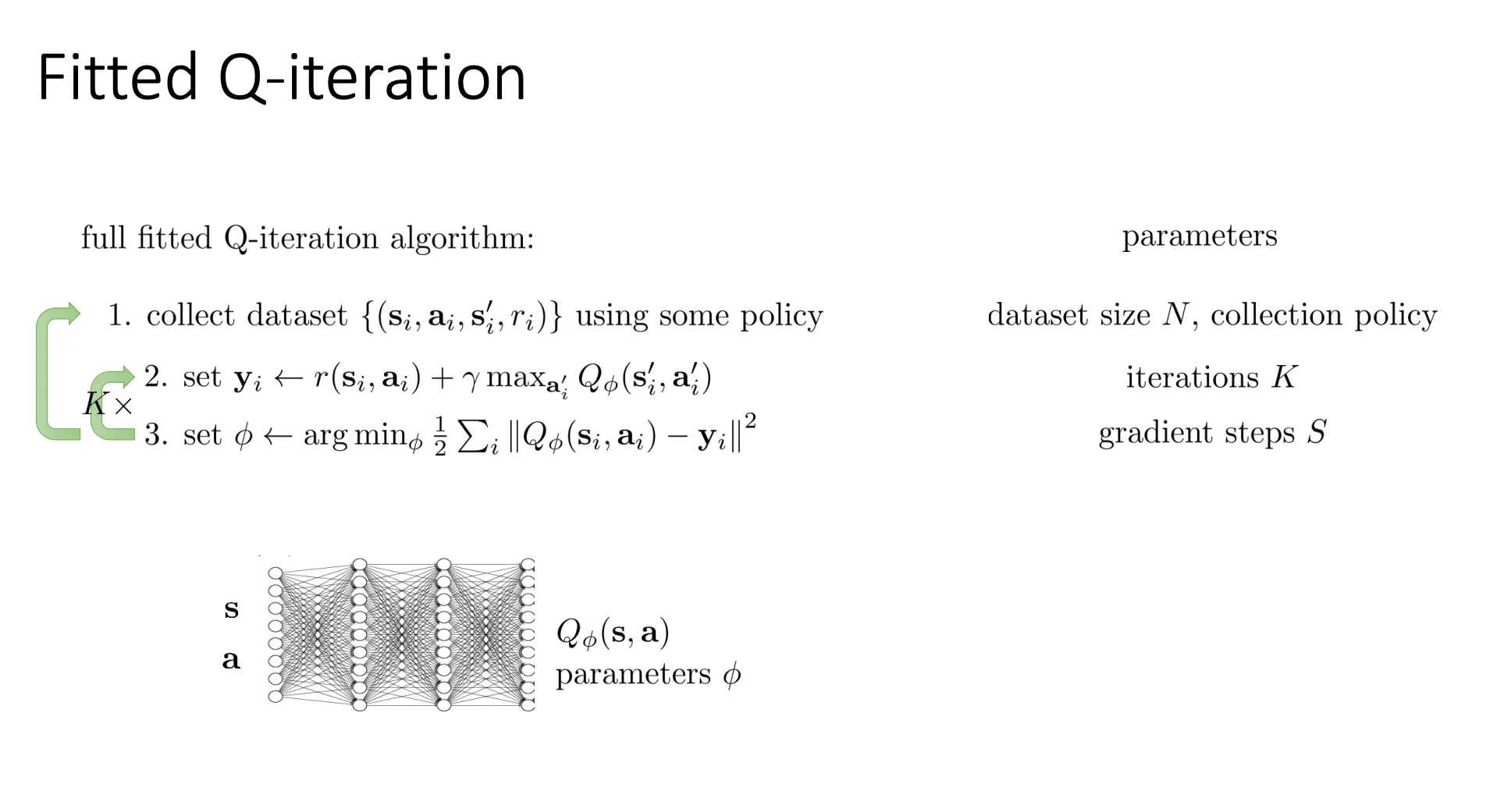 这个算法是Off-Policy的,因为(si,ai) 意味着如果你在状态 s 做了动作 a,环境把你送到 s′ 并给你奖励 r。这完全是由环境的物理规则决定的(比如万有引力、游戏引擎代码),跟你是谁、你的策略 π 是什么没有任何关系。因此,这条数据 (s,a,s′,r) 是一个客观事实。
这个算法是Off-Policy的,因为(si,ai) 意味着如果你在状态 s 做了动作 a,环境把你送到 s′ 并给你奖励 r。这完全是由环境的物理规则决定的(比如万有引力、游戏引擎代码),跟你是谁、你的策略 π 是什么没有任何关系。因此,这条数据 (s,a,s′,r) 是一个客观事实。
同时对于maxai′Qϕ(si′,ai′)
- 我们在计算目标值 yi 时,使用的是 max 操作。
- 这意味着:虽然在历史数据里,收集数据的人在下一步 s′ 可能做了一个很蠢的动作(导致死掉了),但我不管他做了什么。
- 我在计算价值时,假设我自己在下一步会做那个分值最高(max) 的动作。
- 结论:我利用了你的经历(s,a,r,s′),但我在评估未来时,抛弃了你的选择,假设了完美的未来。这就是“异策略”的本质——用别人的过去,规划自己的最优未来。
online Q-Iteration algorithm#
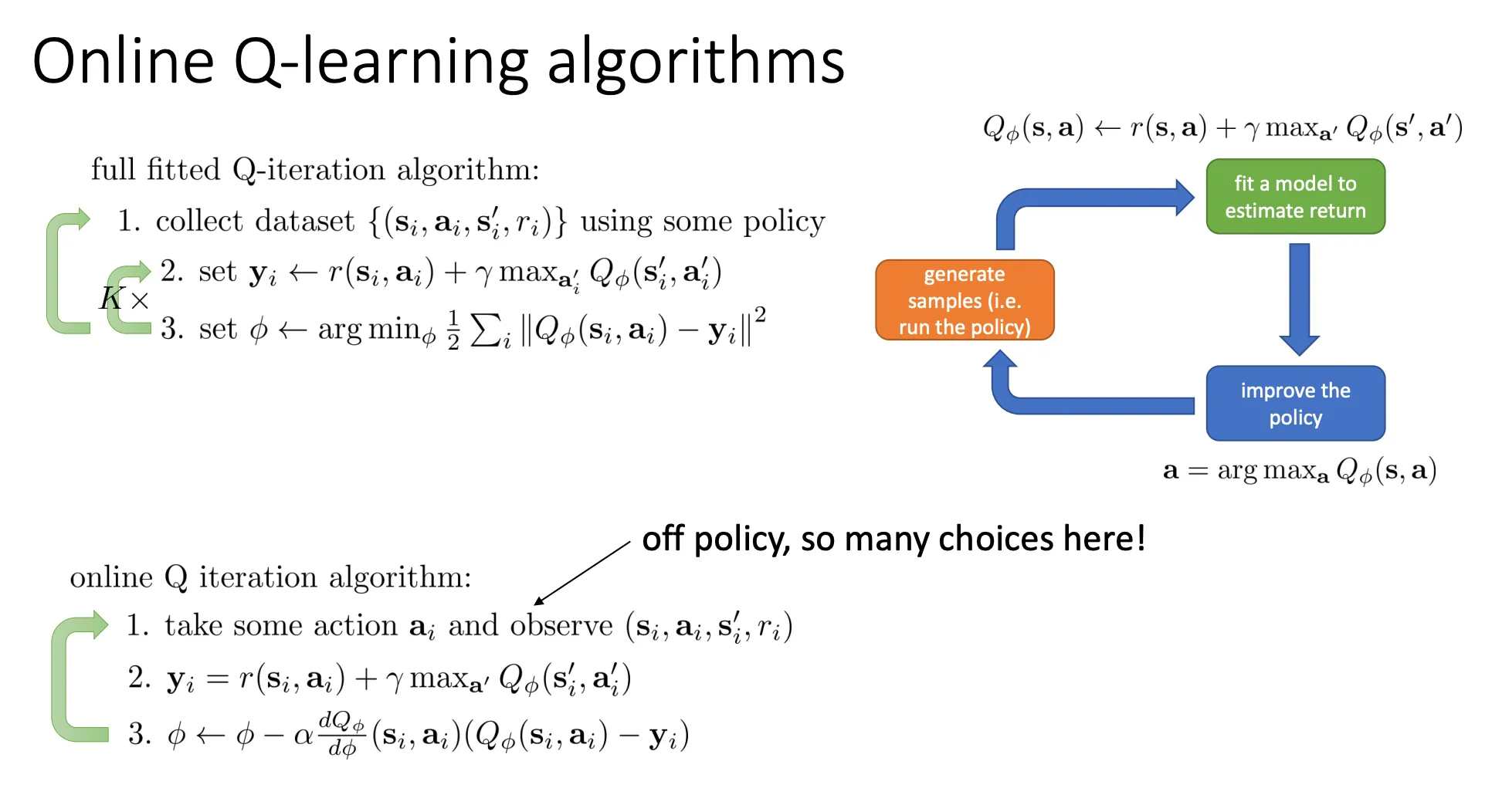 我们不必非要等到收集了一大堆数据才开始训练,我们可以一收集到一条数据,就实时更新我们的神经网络。转变成online的learning
我们不必非要等到收集了一大堆数据才开始训练,我们可以一收集到一条数据,就实时更新我们的神经网络。转变成online的learning
然后对于第一步,那时候我们的Q还没有训练的很好,可能还只是随机化的状态,如果此时根据贪婪策略的话,有可能会陷入局部最优
那么可以采取以下的方法
Epsilon-Greedy (ϵ-greedy)#
这是最常用、最简单的方法。
π(at∣st)={1−ϵϵ/(∣A∣−1)if at=argmaxQ(利用)otherwise(探索)
- 机制: 扔一个骰子。
- 90% 的情况(1−ϵ): 选当前认为最好的动作(Exploitation)。
- 10% 的情况(ϵ): 闭着眼睛随机选一个动作(Exploration)。
- 好处: 保证了每一个动作都有概率被选到。甚至可以让ϵ在一开始的时候比较大然后随着迭代不断的减小
Boltzmann Exploration#
π(at∣st)∝exp(Qϕ(st,at))
- 机制: 根据 Q 值的大小来分配概率。
- Q 值越大,被选中的概率越大。
- Q 值越小,被选中的概率越小(但不是 0)。
- 区别:
- ϵ-greedy 是“要么最好,要么瞎选”。
- Boltzmann 是“分高的常选,分低的少选,特别差的极少选”。它比完全随机要稍微“聪明”一点。
Value Functions in Theory#
这里想讨论的是上面的这些方法其实都不收敛,下面就是证明
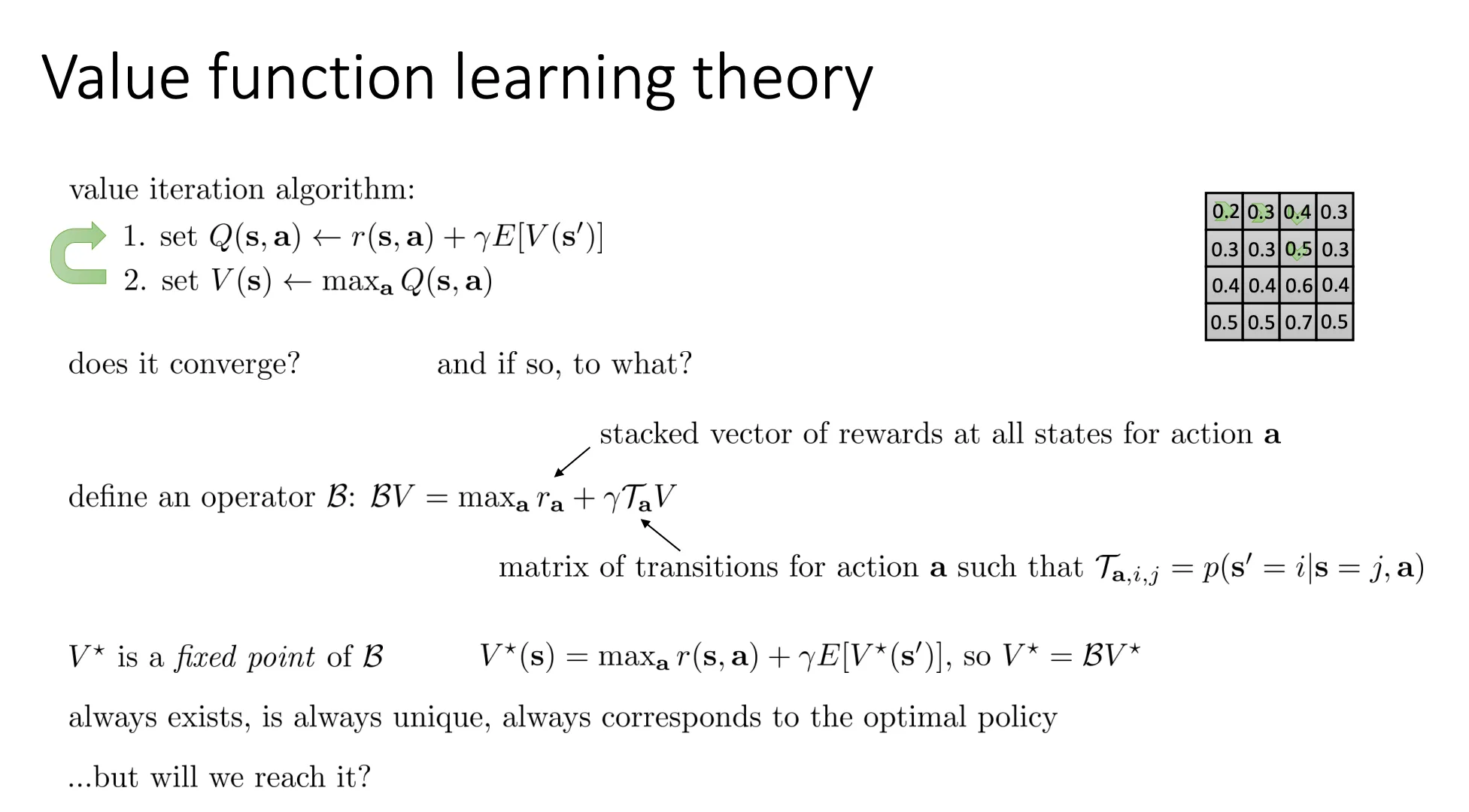
BV=amaxra+γTaV
这里的 B 就是把上面的第1步和第2步合并成了一个数学操作。它把当前的价值函数向量 V 映射成一个新的向量。
V∗=BV∗
意思是:当你达到最优价值函数 V∗ 时,再对它应用一次算子 B(也就是再做一次迭代),它的值不会再改变了。
- 公式展开:
V∗(s)=maxar(s,a)+γE[V∗(s′)]
这就是著名的 贝尔曼最优方程 (Bellman Optimality Equation)。
PPT 强调了 V∗ 的三个关键属性:
- Always exists:最优价值函数一定存在。
- Is always unique:它是唯一的(不管你初始值怎么设,只要收敛,终点都是这一个)。
- Always corresponds to the optimal policy:一旦你求出了 V∗,你也就知道了最优策略(Optimal Policy),即每个状态下该怎么做。
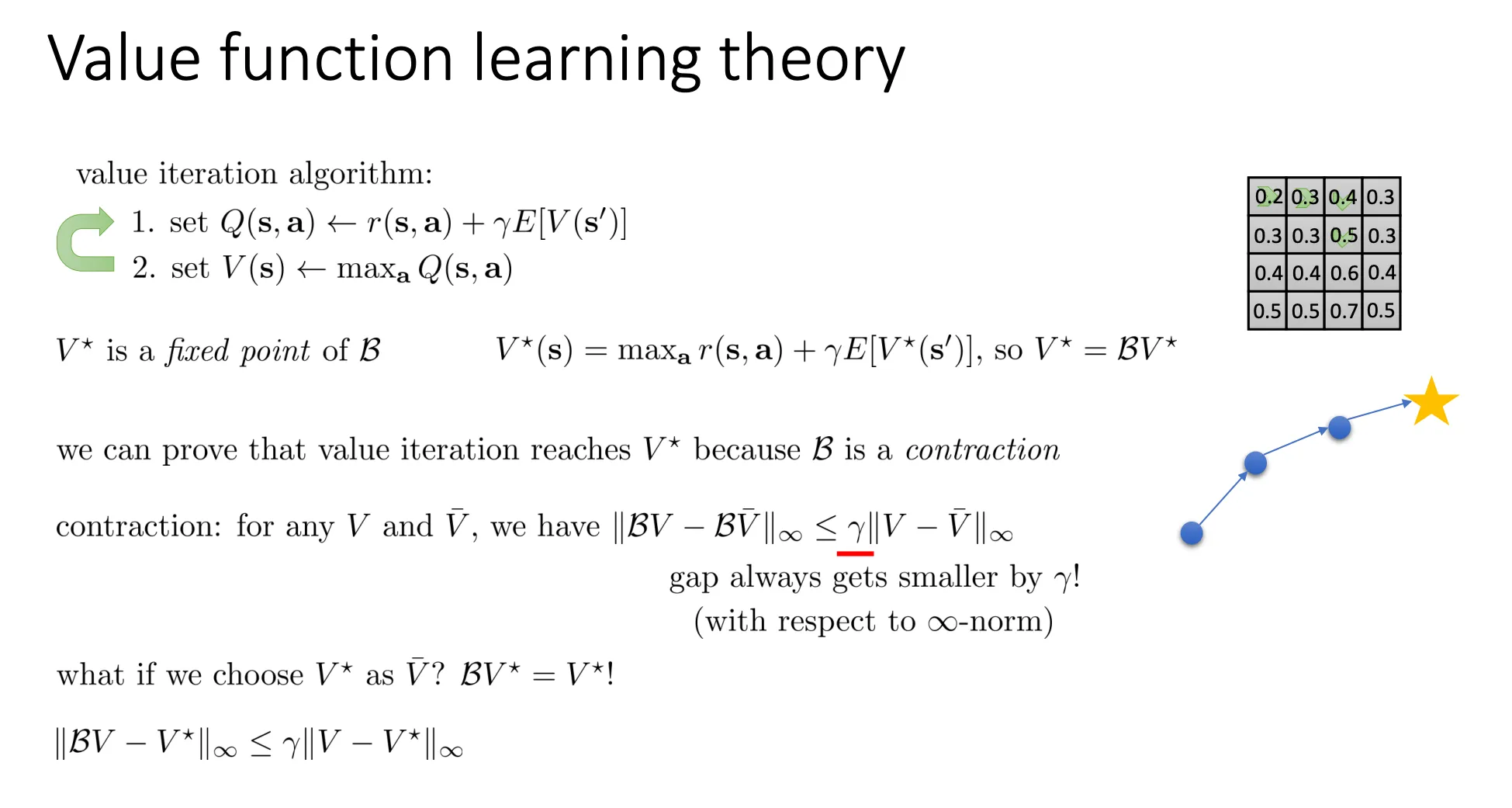
虽然理论上 V∗ 存在且唯一,但通过不断迭代(Value Iteration)是否一定能算出来?
可以。因为贝尔曼算子 B 是一个 压缩映射 (Contraction Mapping)。这意味着每做一次迭代,我们离 V∗ 的距离就会缩小一点(按 γ 的比例缩小),所以只要迭代次数足够多,最终一定会收敛到 V∗
无穷范数#
无穷范数(∞ 范数、最大范数、sup 范数)就是“看这个对象里绝对值最大的那一项”的范数。
对一个向量 x=(x1,…,xn),无穷范数定义为
∥x∥∞=max1≤i≤n∣xi∣
- 也就是说:把所有分量的绝对值算出来,取最大的那个数。
- 例如 x=(2,−5,3),则 ∥x∥∞=5。
压缩映射#
想象你手里有两张不同的价值表(两个向量),分别叫 V 和 U。
我们定义它们之间的“距离”为它们在所有状态中差别最大的那个值的差(无穷范数):
∣∣V−U∣∣∞=smax∣V(s)−U(s)∣
如果算子 B 是压缩的,意味着:
应用算子之后,BV 和 BU 之间的距离,一定要比原来的 V 和 U 之间的距离更小。
数学表达为:
∣∣BV−BU∣∣∞≤γ∣∣V−U∣∣∞
其中 γ 是折扣因子,且 0≤γ<1。因为 γ<1,所以距离被“压缩”了。
前面讨论的是Value Iteration中的B是压缩映射,现在迁移到fitted Value Iteration
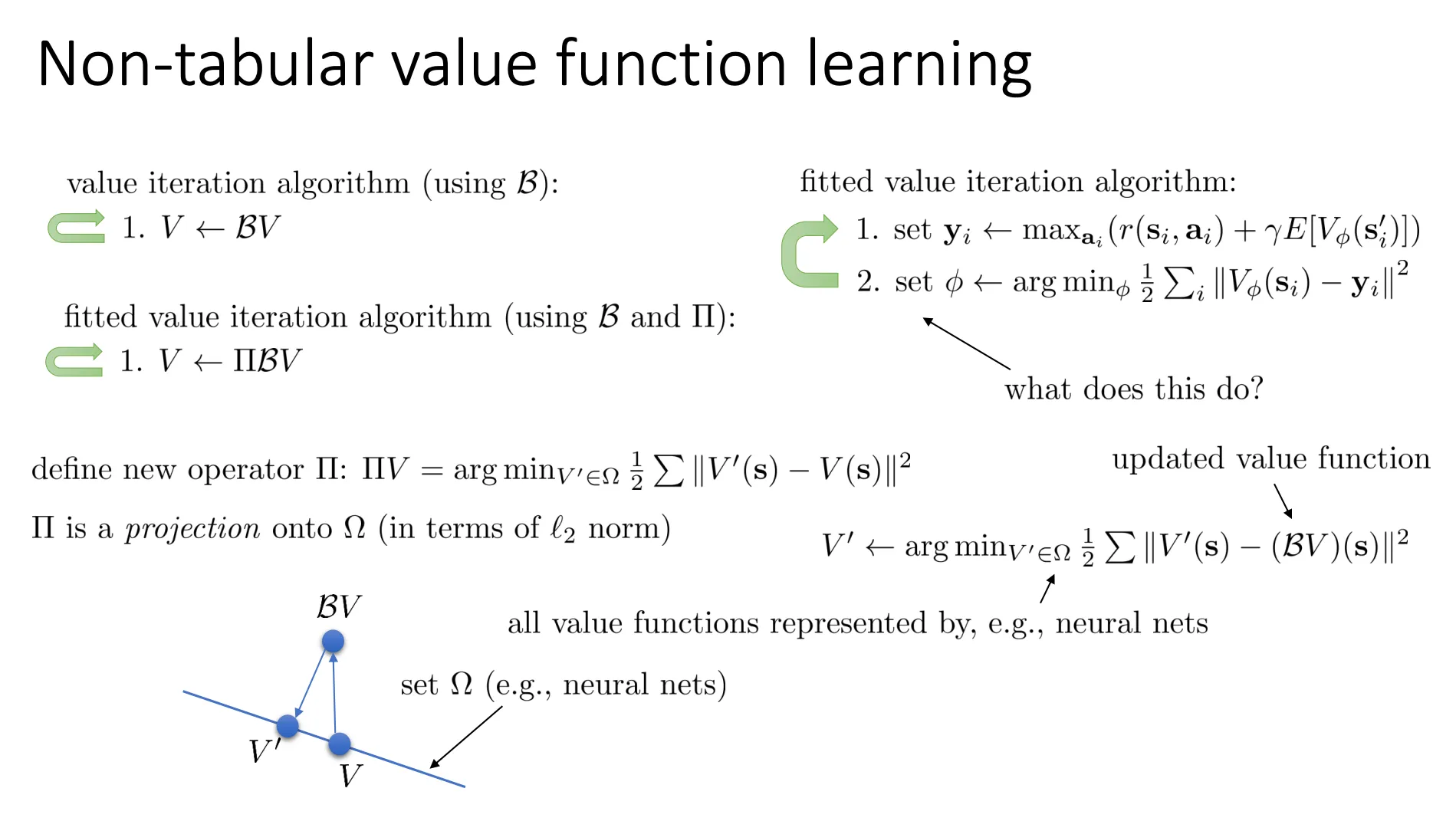 这是个监督学习 (Supervised Learning) 的过程:
这是个监督学习 (Supervised Learning) 的过程:
- 第1步:生成目标 (Label Generation)
yi←aimax(r(si,ai)+γE[Vϕ(si′)])
- 这一步计算出的 yi 其实就是 BV 的具体数值。
- 这就是我们在训练神经网络时的 “标签” (Target/Label)。
- 第2步:最小化误差 (Regression)
ϕ←argϕmin21i∑∣∣Vϕ(si)−yi∣∣2
- 这是一个典型的 回归 (Regression) 任务。
- 它在调整神经网络的参数 ϕ,让网络预测的输出 Vϕ(si) 尽可能接近第1步算出来的目标 yi。这就是数学上定义的“投影”操作(Π),使用的是 L2 范数(最小二乘法)。
左下角的图非常直观地解释了这个过程:
- 蓝线 (Ω):代表你的神经网络能表达的所有可能的函数的集合(假设空间)。
- 点 V:当前的价值函数(在蓝线上)。
- 点 BV:应用贝尔曼公式计算出的理想目标值。注意,它不在蓝线上,说明神经网络无法完美拟合这个理想值。
- 点 V′:这是 ΠBV。它是蓝线上离 BV 最近的点。
- Π (Projection):就是把理想的、复杂的 BV 强行拉回(投影)到神经网络能表示的范围内,找一个误差最小的替代品。
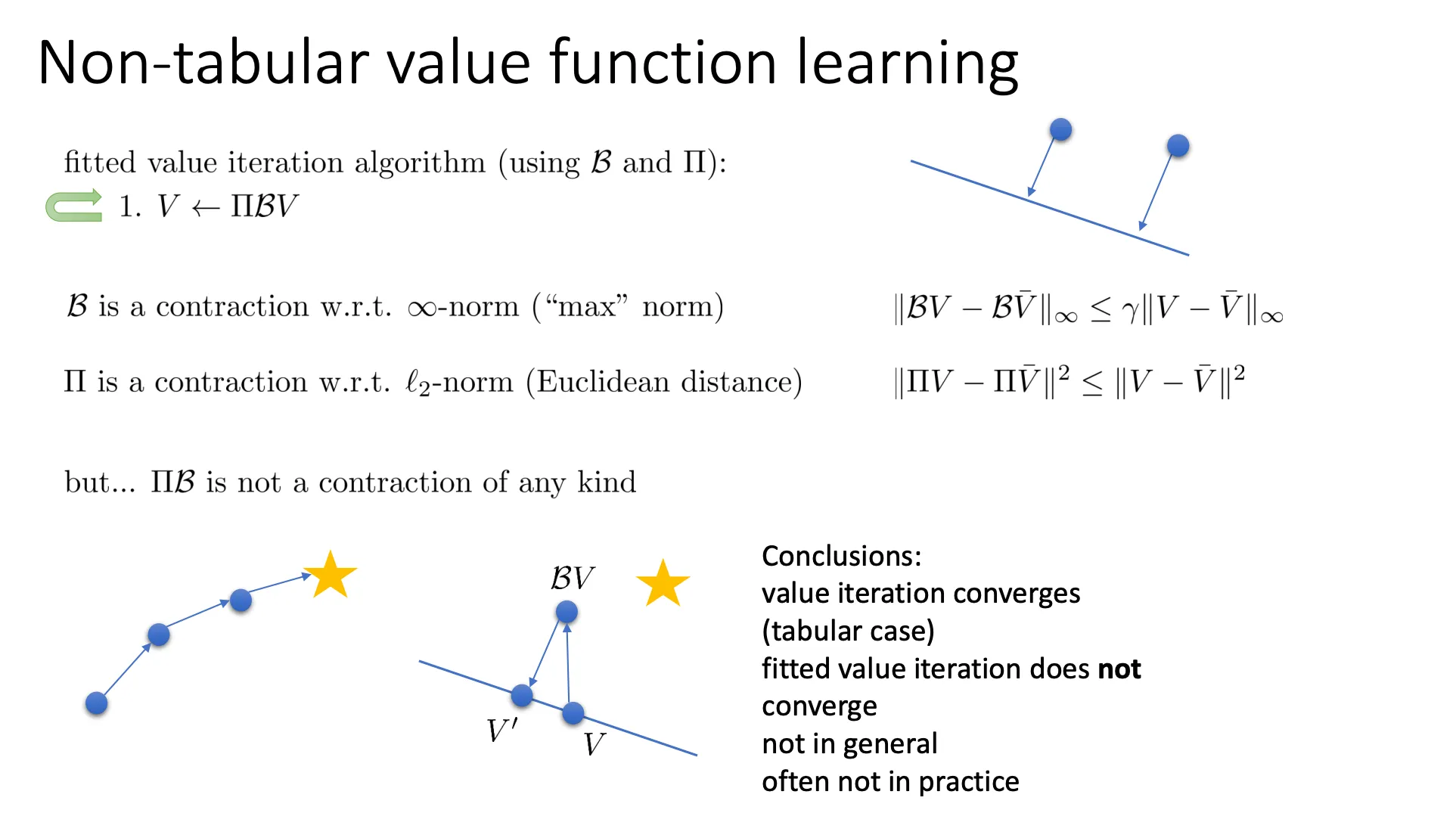 然而B是压缩映射,Π也是压缩映射,因为两个点被投影到一条线上距离一定会小于等于原本的距离。
然而B是压缩映射,Π也是压缩映射,因为两个点被投影到一条线上距离一定会小于等于原本的距离。
但是ΠB并不一定是压缩映射,且大多情况都不是压缩映射,可以看左下角的图就是例子。
所以这也证明了为什么fitted Value Iteration并不收敛。我们还可以用同样的思路证明Q-learning也并不收敛。